Question
Question: What is expression for Moment of inertia of a solid cylinder about its own axis of symmetry and abou...
What is expression for Moment of inertia of a solid cylinder about its own axis of symmetry and about an axis perpendicular to its length ?
Solution
To derive the expression for Moment of inertia of a solid cylinder about its axes, we make use of the theorem of parallel and perpendicular axes. Also, the concept of moment of inertia of a rigid body about the axis of rotation is used.
Formula used:
Moment of inertia is of a rigid body can be expressed as
I=∫r2dm
Where, r - perpendicular distance of particles in a rigid body from the axis of rotation.
dm - infinitesimal small part of mass of the whole body situated at distance r.
Complete step by step answer:
About its own axis of symmetry, consider a solid cylinder of length L, mass M having density ρrotating about an axis passing through its own axis of symmetry. Let us consider the one end area of the cylinder which looks like a shell and the mass element of shell dm in terms of infinitesimal radial thickness dr.
(i) Using, the general definition of Moment of inertia,
I=∫0Mr2dm−−−−−−−−−−(1)
The mass element can be expressed in terms of infinitesimal radial thickness drby
dm=ρdV=ρL2πrdr−−−−−−−−−−−(2)
Here, dV - volume element of the shell which is dV=2πrL
Substituting the value of dmin eq(1), we get
I=2πρL∫0Rr3dr
Here, the change of limits of integration is due to substitution of drin place of dm.
By solving, we get
I=2πρL4R4−−−−−−−−−−(3)
Now, the density is given by ρ=VM=πR2LM.
Substituting this in eq(3), we get
I=2π[πR2LM]L4R4
∴I=21MR2
This is the moment of inertia of a solid cylinder about its own axis of symmetry .
(ii) About an axis perpendicular to its length, consider the solid cylinder having mass M , radius R, length L and Z axis passing through the central axis of the cylinder.
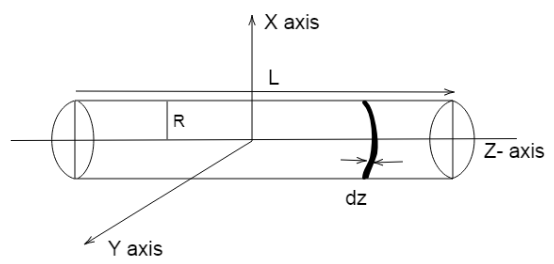
Let the moment of inertia of cylinder infinitesimally thin disks with thickness dz .
dm=ρ×V
⇒dm=VM×(πr2dz)
⇒dm=πr2LM×(πr2dz)
Thus, dm=LMdz−−−−−−−−−−−−(1)
The moment of inertia about central axis is,
IZ=21R2dm
Now, Using the theorem of perpendicular axes, we have
dIZ=dIX+dIY
Here, both X and Y moments of inertia are equal by symmetry, and hence
dIX=2dIZ−−−−−−−−−−(2)
Substituting from above equation, we get
dIX=21×[21R2dm]
\\Rightarrow d{I_X} = \dfrac{1}{4}{R^2}dm - - - - - - - - - - - - (3)]
Also, for X-axis, we make use of theorem of parallel axis, then
dIX=41R2dm+z2dm−−−−−−−−−−−−(4)
Now, Conducting the integration over the length of solid cylinder from z=0 to z=L,
IX=∫0LdIX
⇒IX=∫0L41LMR2dz+∫0Lz2LMdz
By solving, and ignoring the constants, we get
IX=41LMR2L+3ML2
∴IX=41MR2+3ML2
This is the expression for moment of inertia of a solid cylinder about an axis passing through its centre and perpendicular to its length.
Note: We should be familiar with integration over the surface within the limits. We must know about the theorem of parallel and perpendicular axes about an axis of rotation.Moment of inertia is defined as the quantity expressed by the body resisting angular acceleration which is the sum of the product of the mass of every particle with its square of a distance from the axis of rotation.