Question
Question: The moment of inertia of the plate about x- axis is 
(A) 8ML2
(B) 32ML2
(C) 24ML2
(D) 6ML2
Solution
Hint
Firstly, we will observe the diagram. Using Pythagoras theorem, we will calculate the side of the right angled triangle. Then we will find out the moment of inertia about the axis which is passing through C. We know that the perpendicular axes theorem. We will use this theorem to calculate the moment of inertia along AB. Due to symmetry we will write that the value is equal to the value of the moment of inertia about the X axis. Then again using the perpendicular axes theorem we will find out the required solution.
Complete step by step answer
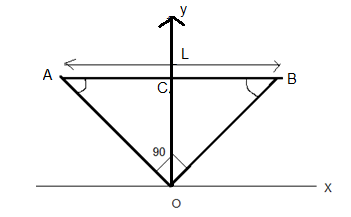
Given that the length of AB is L
Mass of the plate= M
ΔOABis a right angled triangle. From geometry we can see that AB=L ( ∵AB= hypotenuse)
OA=OB=2L
Moment of inertia about an axis passing through C and perpendicular to plane IC=6Ma2
IC=6M(2L)2=12ML2
The perpendicular axis theorem states that the moment of inertia of a laminar body about an axis perpendicular to its plane is equal to the sum of the moment of inertia of the laminar about any two mutually perpendicular axes in its plane and intersecting each other at the point where the perpendicular axis passes through it.
Let IAB= the moment of inertia about the AB axis
Using perpendicular axis theorem, we can get IY+IAB=IC
Due to symmetry we can say that
IAB=IY
⇒IAB=IY
⇒IAB=2IC=24ML2
IZ= the moment of inertia about the Z axis
IY= the moment of inertia about the Y axis
IX= the moment of inertia about the Z axis
So, we can say that IY=24ML2 and IZ=6ML2
Again, using the perpendicular axes theorem, we can say that
IZ=IX+IY
⇒IX=8ML2
So, the moment of inertia of the plate about x- axis is 8ML2. Hence option (A) is correct.
Note
Some may think that the correct option is “A” because the value of IAB=24ML2 . The AB is parallel to the x axis. So, after calculating the moment of inertia along AB we need to solve by using symmetry. So, to calculate exactly along the x axis we have to apply the perpendicular axes theorem.