Question
Question: Suppose you are anchored near the shore of a channel in which there is steady current, and you are g...
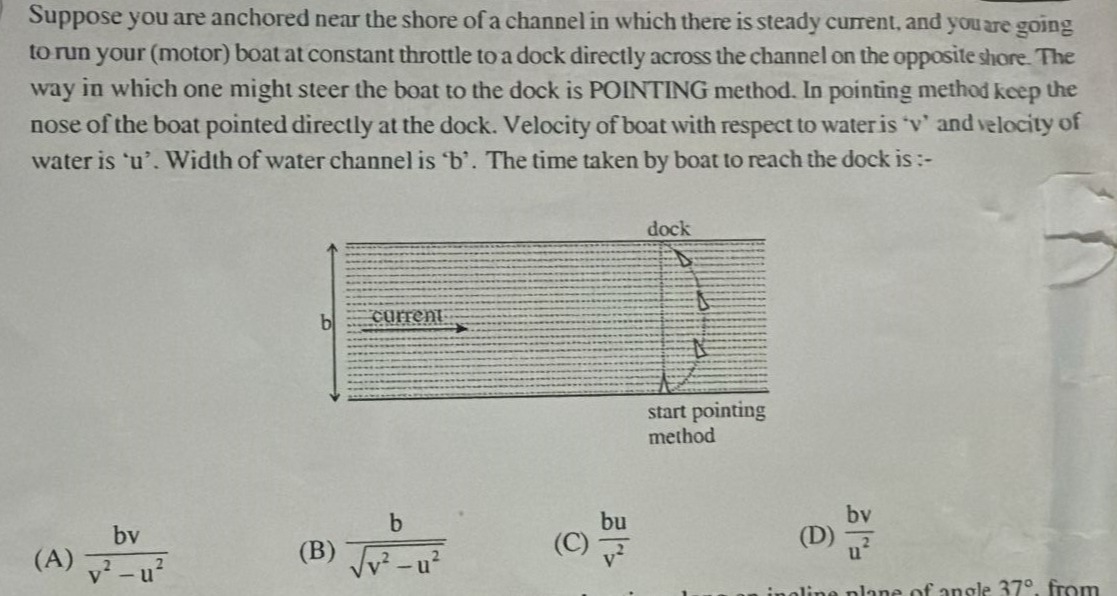
Suppose you are anchored near the shore of a channel in which there is steady current, and you are going to run your (motor) boat at constant throttle to a dock directly across the channel on the opposite shore. The way in which one might steer the boat to the dock is POINTING method. In pointing method keep the nose of the boat pointed directly at the dock. Velocity of boat with respect to water is 'v' and velocity of water is 'u'. Width of water channel is 'b'. The time taken by boat to reach the dock is :-
v2−u2bv
v2−u2b
v2bu
u2bv
v2−u2bv
Solution
Let the starting point of the boat be the origin (0, 0) and the dock be at (0, b). The river flows in the positive x-direction with velocity u=ui^. The velocity of the boat with respect to water is vbw, with magnitude v. The boat is always pointed towards the dock. Let the instantaneous position of the boat be (x,y). The vector from the boat to the dock is rbd=(0−x)i^+(b−y)j^=−xi^+(b−y)j^. The direction of vbw is along rbd.
So, vbw=v∣rbd∣rbd=vx2+(b−y)2−xi^+(b−y)j^.
The velocity of the boat with respect to the ground is vb=vbw+vw. vb=vx2+(b−y)2−xi^+(b−y)j^+ui^. The components of the boat's velocity are: dtdx=vx=u−x2+(b−y)2vx dtdy=vy=x2+(b−y)2v(b−y)
Let r=x2+(b−y)2 be the distance from the boat to the dock. Consider the rate of change of the distance from the boat to the dock. The velocity of the boat relative to the dock is vb−vd. Since the dock is stationary, vd=0, so the velocity of the boat relative to the dock is vb. The rate of change of the distance r is the component of vb in the direction from the boat to the dock (which is the direction of −rbd). dtdr=vb⋅(−∣rbd∣rbd)=(v∣rbd∣rbd+ui^)⋅(−∣rbd∣rbd)=−v(∣rbd∣rbd⋅∣rbd∣rbd)−u(i^⋅∣rbd∣rbd). dtdr=−v(1)−u(i^⋅x2+(b−y)2−xi^+(b−y)j^)=−v−ux2+(b−y)2−x=−v+x2+(b−y)2ux.
This still depends on x and y. Let's look for a simpler approach. Consider the y-component of the velocity: dtdy=x2+(b−y)2v(b−y). Notice that x2+(b−y)2 is the distance r from the boat to the dock. So, dtdy=rv(b−y). Also, dtdr=−v+rux.
Let's consider the relationship between x and y. From the first equation, dtdx=u−rvx. We have dtdy=rv(b−y). Dividing the two equations: dydx=rv(b−y)u−rvx=v(b−y)ur−vx. v(b−y)dydx=ur−vx. v(b−y)dydx+vx=ur=ux2+(b−y)2.
This differential equation looks hard to solve. Let's consider the energy approach or some invariant.
Let's reconsider the y-component of velocity: dtdy=x2+(b−y)2v(b−y). Let y=b−rcosθ and x=rsinθ, where θ is the angle between the line from the boat to the dock and the negative y-axis. This might be complicated due to the moving coordinate system.
Let's go back to dtdy=rv(b−y). We also have dtdr=−v+rux. From the figure, as the boat moves, x changes, and y changes. The boat starts at (0,0) and ends at (0,b). The y-component of the boat's velocity relative to the ground is vy=x2+(b−y)2v(b−y). Let's assume the boat reaches the dock at time T. We need to find T. T=∫0bdydtdy=∫0bv(b−y)x2+(b−y)2dy. This integral still depends on x(y).
Let's consider a special case: if u=0, then dtdx=−x2+(b−y)2vx and dtdy=x2+(b−y)2v(b−y). If the boat is pointed directly at the dock and there is no current, the boat moves along the straight line from (0,0) to (0,b) with speed v. The time taken would be b/v. Let's check the options for u=0. (A) v2−02bv=vb. (B) v2−02b=vb. (C) v2b⋅0=0. (D) 02bv, undefined. So, options A and B are possible candidates.
Let's consider another approach. Let the angle that the line from the boat to the dock makes with the y-axis be α. So cosα=x2+(b−y)2b−y. Then dtdy=vcosα. Also, sinα=x2+(b−y)2−x. dtdx=u+vsinα=u−x2+(b−y)2vx.
Consider the case where v > u. If v <= u, the boat might not be able to reach the dock if the current is strong enough. The problem statement implies the boat reaches the dock. So, let's assume v > u.
This problem is a classic example of a pursuit curve. The boat is pursuing the dock.
Let's use the y-component of velocity: dtdy=x2+(b−y)2v(b−y). Let the distance from the boat to the dock be r=x2+(b−y)2. dtdy=rv(b−y).
Consider the velocity component along the line joining the boat and the dock. The relative velocity of the boat with respect to the dock along the line joining them is the rate at which the distance between them decreases. The velocity of the boat is vb=vbw+u. The direction of vbw is towards the dock. Let r^ be the unit vector from the boat to the dock. vbw=vr^. vb=vr^+u. The rate of decrease of the distance r is −dtdr=vb⋅r^=(vr^+u)⋅r^=v(r^⋅r^)+u⋅r^=v+u⋅r^. Let θ be the angle between r^ and i^. Then u⋅r^=ucosθ. The vector from the boat (x,y) to the dock (0,b) is (−x,b−y). The angle θ is the angle between (−x,b−y) and (1,0). cosθ=x2+(b−y)2⋅1(−x,b−y)⋅(1,0)=x2+(b−y)2−x. So, −dtdr=v+ux2+(b−y)2−x=v−x2+(b−y)2ux. dtdr=−v+x2+(b−y)2ux. This matches our previous result.
Let's consider the y-component again: dtdy=x2+(b−y)2v(b−y). Let y=b−δ, where δ is the remaining distance in the y-direction. dtd(b−δ)=x2+δ2vδ. −dtdδ=x2+δ2vδ.
Consider the relationship between x and δ. dtdx=u−x2+δ2vx. dδdx=−x2+δ2vδu−x2+δ2vx=−vδux2+δ2−vx=vδvx−ux2+δ2. vδdδdx=vx−ux2+δ2.
Let x=δf(δ). vδ(f+δf′)=vδf−uδ2f2+δ2=vδf−uδf2+1. vδ2f′=−uδf2+1. vδf′=−uf2+1. vδdδdf=−uf2+1. f2+1df=−vuδdδ. Integrating both sides: ∫f2+1df=−vu∫δdδ. arsinh(f)=−vulnδ+C. arsinh(δx)=−vulnδ+C.
At t=0, y=0, so δ=b−0=b. Also x=0. arsinh(b0)=−vulnb+C. arsinh(0)=0, so C=vulnb. arsinh(b−yx)=−vuln(b−y)+vulnb=vuln(b−yb). b−yx=sinh(vuln(b−yb)).
Now consider the time. dtdy=x2+(b−y)2v(b−y)=(b−y)2sinh2(vulnb−yb)+(b−y)2v(b−y). dtdy=(b−y)sinh2(vulnb−yb)+1v(b−y)=cosh2(vulnb−yb)v=cosh(vulnb−yb)v. dydt=v1cosh(vulnb−yb). Let z=vulnb−yb. dydz=vubb−y(b−y)2b=v(b−y)u. dy=uv(b−y)dz. dzdt=dydtdzdy=v1cosh(z)⋅uv(b−y)=ub−ycosh(z). Since z=vulnb−yb, lnb−yb=uvz, b−yb=evz/u, b−y=be−vz/u. dzdt=ube−vz/ucosh(z)=ube−vz/u2ez+e−z=2ub(ez(1−v/u)+e−z(1+v/u)).
We need to integrate from y=0 to y=b. When y=0, z=vulnbb=0. When y=b, ln0b is undefined. This approach seems problematic.
Let's consider the time taken to cross the channel in the y-direction. dt=vydy=v(b−y)x2+(b−y)2dy. Let b−y=δ. dy=−dδ. T=∫b0vδx2+δ2(−dδ)=∫0bvδx2+δ2dδ. We know δx=sinh(vulnδb). x=δsinh(vulnδb). x2+δ2=δ2sinh2(vulnδb)+δ2=δsinh2(vulnδb)+1=δcosh(vulnδb). T=∫0bvδδcosh(vulnδb)dδ=v1∫0bcosh(vulnδb)dδ. Let w=lnδb. When δ→0, w→∞. When δ=b, w=ln1=0. δb=ew, δ=be−w. dδ=−be−wdw. T=v1∫∞0cosh(vuw)(−be−w)dw=vb∫0∞cosh(vuw)e−wdw. T=vb∫0∞2euw/v+e−uw/ve−wdw=2vb∫0∞(e(u/v−1)w+e−(u/v+1)w)dw. T=2vb[u/v−1e(u/v−1)w−u/v+1e−(u/v+1)w]0∞. For the upper limit at w=∞, we need the exponents to be negative. u/v−1<0⟹u<v. −(u/v+1)<0 is always true since u, v > 0. So, we must have u<v. Assuming this, the terms at w=∞ are 0. At w=0, e0=1. T=2vb[(0−0)−(u/v−11−u/v+11)]. T=−2vb(u−vv−u+vv)=−2b(u−v1−u+v1). T=−2b((u−v)(u+v)u+v−(u−v))=−2b(u2−v22v)=−u2−v2bv=v2−u2bv.
This matches option (A). The condition v > u is necessary for the integral to converge at the upper limit, and also physically, if u >= v, the boat would be swept downstream faster than it can make progress across, and might not reach the dock at (0,b) if the river is infinitely long. However, the question asks for the time taken to reach the dock, implying it is reachable.