Question
Question: Kinetic energy of the system in centre of mass frame is- (A). \(\dfrac{3}{2}m\omega _{0}^{2}{{L}^{...
Kinetic energy of the system in centre of mass frame is-
(A). 23mω02L2
(B). 21mω02L2
(C). 31mω02L2
(D). 34mω02L2
(a)
(b)
Solution
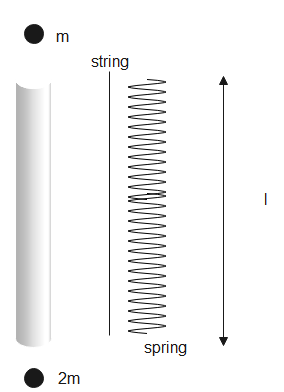
The system contains two masses connected to a cylinder with a spring of length L. The system will rotate about its centre of mass. The centre will lie more towards the heavier mass and the motion is purely rotational. The rotational kinetic energy is analogous to translational kinetic energy and it depends on the moment of inertia and rotational velocity.
Formulas used:
y=m1+m2m1y1+m2y2
K=21Iω2
Complete answer:
In the given figure, the cylinder will have only rotational kinetic energy.
The position of centre of mass for the frame is given by-
y=m1+m2m1y1+m2y2
Here, m1,m2 are the masses of the different components of the system, y1,y2 are the positions of the different components.
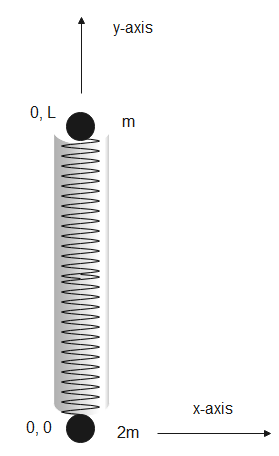
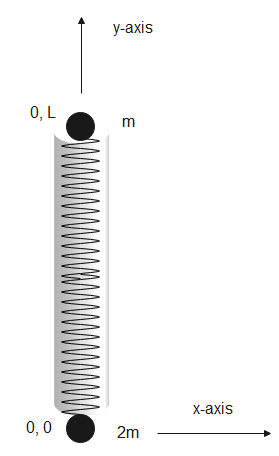
Given, m at position (0,0) and 2m at position (0,L). We substitute given values in the above equation to get,
y=m+2mm(0)+2m(L)⇒y=32L
Therefore the position of the centre of mass is at (0,32L). The cylinder will rotate about its centre of mass. The centre of mass will be 32L distance away from m and 31L distance away from 2m.
The rotational kinetic energy is given by-
K=21Iω2 - (1)
Here, K is the kinetic energy
I is the moment of inertia
ω is the angular velocity
The moment of inertia for the cylinder is mL2. The total moment of inertia is the sum of moment of inertia of both masses. Therefore,
I=I1+I2⇒I=2m(3L)2+m(32L)2∴I=32mL2
Let the initial angular velocity be ω0. We substitute the given values in eq (2) to get,
K=21×32mL2ω02∴K=31mL2ω02
Therefore, the kinetic energy of the system about its centre of mass is 31mL2ω02.
Hence, the correct option is (C).
Note:
The motion of the system was pure rotational. The centre of mass is the point of symmetry of the system. Since, the system lies entirely on the y-axis, its centre of mass will also lie on the y-axis. The moment of inertia is analogous to the mass. The system is an isolated system as no external force or torque is acting on it.