Question
Question: From a circular disc of radius \(R\) and mass \(9M\), a small disc of mass \(M\) and radius \(\dfrac...
From a circular disc of radius R and mass 9M, a small disc of mass M and radius 3R is removed concentrically. The moment of inertia of the remaining disc about an axis perpendicular to the plane of the disc and passing through its centre is
(A)940MR2(B)MR2(C)4MR2(D)94MR2
Solution
First find the inertia for complete disc about the perpendicular axis passing through center O. Then calculate the remaining mass after taking that small piece mass out from the disc, and then apply the parallel axis theorem.
Formula used:
Moment of inertia:
I=2MR2
M- mass of the object
R- radius of the disc
Complete answer:
Mass of the disc = 9M
Mass of removed portion of disc = M
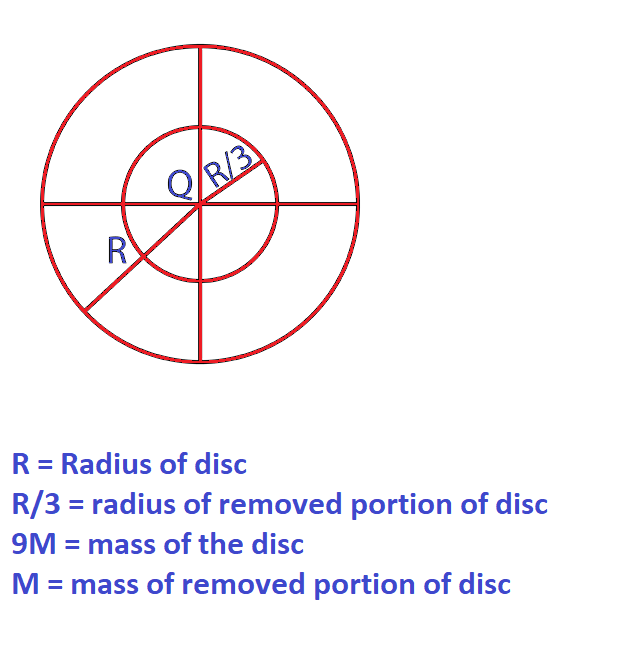
The moment of inertia of the complete disc about an axis passing through its centre O and perpendicular to its plane is
I1=21(9M)R2⇒29MR2
Now, the moment of inertia of the disc with removed portion
I2=21M(3R)2⇒181MR2
Therefore, moment of inertia of the remaining portion of disc about O is
I=I1−I2⇒29MR2−181MR2⇒940MR2
So, the correct answer is “Option A”.
Additional Information:
For simple objects with geometric symmetry, one can often determine the instant of inertia in a particular closed-form expression. Typically this happens when the mass density is constant, but in some cases the density can vary throughout the thing also. generally, it's going to not be straightforward to symbolically express the instant of inertia of shapes with more complicated mass distributions and lacking symmetry. When calculating moments of inertia, it's useful to recollect that it's an additive function and exploit the parallel axis and perpendicular axis theorems.
Note:
The moment of inertia of a rigid composite system is the sum of the moments of inertia of its component subsystems (all taken about an equivalent axis). Its simplest definition is that the moment of mass with reference to distance from an axis. For bodies constrained to rotate during a plane, only their moment of inertia about an axis perpendicular to the plane, a scalar value, matters.