Question
Question: Find angular momentum of the rolling body about point P shown in figure, at time t = 2 s in each of ...
Find angular momentum of the rolling body about point P shown in figure, at time t = 2 s in each of the following cases
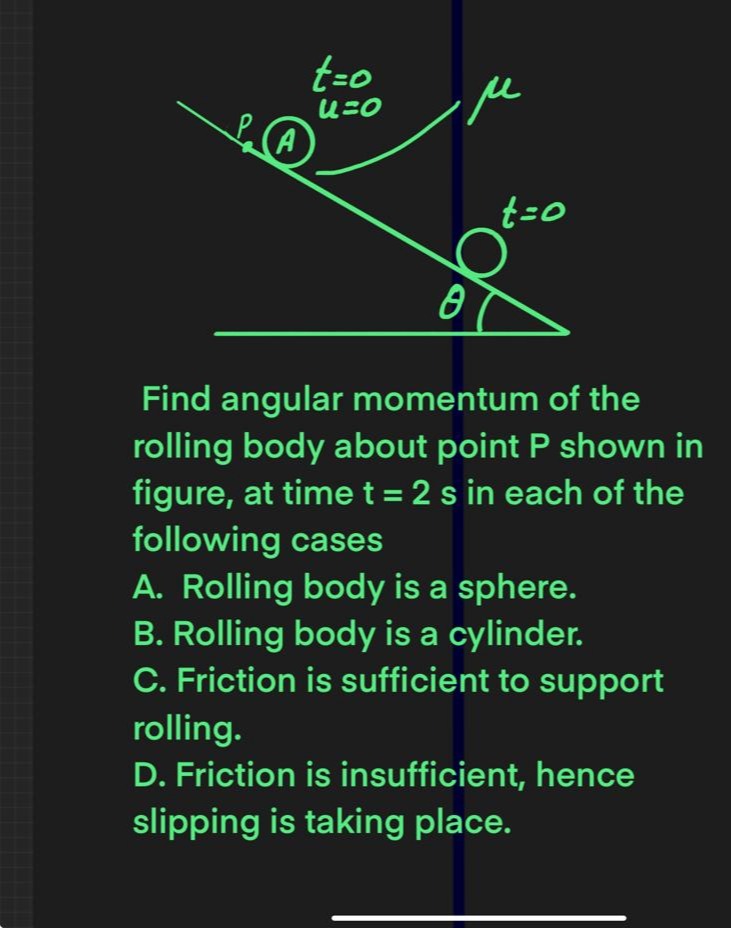
Rolling body is a sphere.
Rolling body is a cylinder.
Friction is sufficient to support rolling.
Friction is insufficient, hence slipping is taking place.
A. Rolling body is a sphere: LP(2)=74MRgsinθ B. Rolling body is a cylinder: LP(2)=32MRgsinθ C. Friction is sufficient to support rolling: LP(2)=1+c2cMRgsinθ, where ICM=cMR2. D. Friction is insufficient, hence slipping is taking place: LP(2)=2μkMRgcosθ
Solution
The angular momentum about point P is given by LP=rCM/P×MvCM+ICMω. Since rCM/P and vCM are collinear, the first term is zero, so LP=ICMω.
For rolling without slipping (Cases A, B, C), the acceleration is a=1+ICM/(MR2)gsinθ and angular acceleration is α=a/R. The angular velocity at t=2 s is ω(2)=α×2.
Case A (Sphere): ICM=52MR2. a=75gsinθ. α=7R5gsinθ. ω(2)=7R10gsinθ. LP(2)=52MR2×7R10gsinθ=74MRgsinθ.
Case B (Cylinder): ICM=21MR2. a=32gsinθ. α=3R2gsinθ. ω(2)=3R4gsinθ. LP(2)=21MR2×3R4gsinθ=32MRgsinθ.
Case C (Sufficient friction): ICM=cMR2. a=1+cgsinθ. α=(1+c)Rgsinθ. ω(2)=(1+c)R2gsinθ. LP(2)=cMR2×(1+c)R2gsinθ=1+c2cMRgsinθ.
Case D (Insufficient friction): Kinetic friction fk=μkN=μkMgcosθ. Linear acceleration a=gsinθ−fk/M=gsinθ−μkgcosθ. Angular acceleration α=ICMfkR=cMR2μkMgcosθR=cRμkgcosθ. Angular velocity ω(2)=α×2=cR2μkgcosθ. Angular momentum LP(2)=ICMω(2)=cMR2×cR2μkgcosθ=2μkMRgcosθ.