Question
Question: A rod of mass $m$ is kept on a cylinder and sphere each of radius $R$. The masses of the sphere and ...
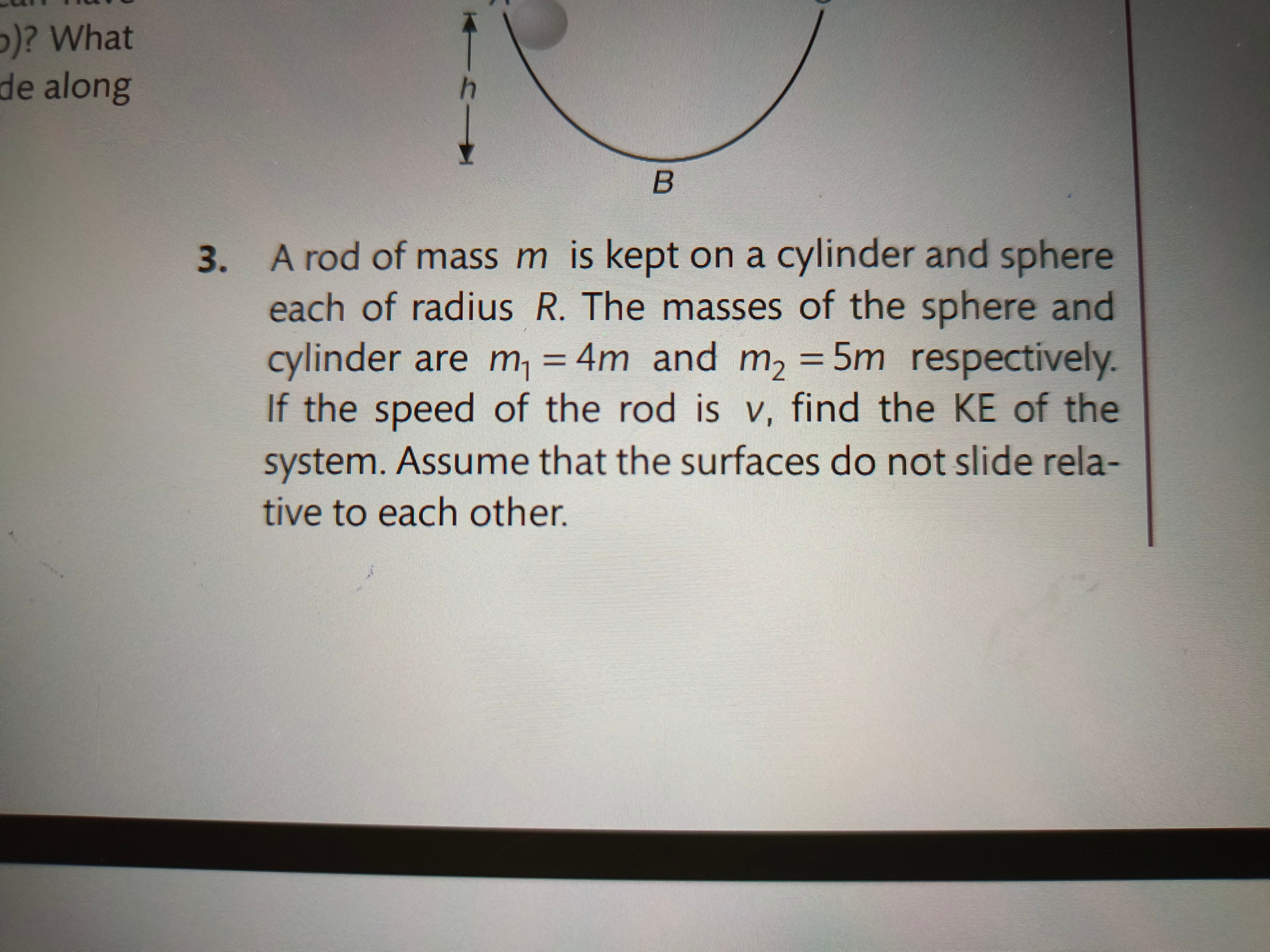
A rod of mass m is kept on a cylinder and sphere each of radius R. The masses of the sphere and cylinder are m1=4m and m2=5m respectively. If the speed of the rod is v, find the KE of the system. Assume that the surfaces do not slide relative to each other.
80171mv2
Solution
The system consists of a rod, a sphere, and a cylinder. All surfaces do not slide relative to each other, implying pure rolling for the sphere and cylinder.
-
Kinetic Energy of the Rod (KErod): The rod of mass m moves with a translational speed v. KErod=21mv2
-
Kinetic Energy of the Sphere (KEs): The sphere has mass m1=4m and radius R. It is a solid sphere, so its moment of inertia about its center of mass is Is=52m1R2. Let vs be the translational speed of the sphere's center of mass and ωs be its angular speed. The rod is moving at speed v. The point of contact between the rod and the sphere on the top of the sphere must also have speed v (no slipping). The velocity of the top point of the sphere is vs+Rωs. So, vs+Rωs=v (Equation 1). The sphere is rolling without slipping on the ground (assumed stationary). The velocity of the bottom point of the sphere is vs−Rωs. Since there is no slipping, this velocity must be zero. So, vs−Rωs=0⇒vs=Rωs (Equation 2). Substituting (Equation 2) into (Equation 1): Rωs+Rωs=v⇒2Rωs=v⇒ωs=2Rv. Then, vs=R(2Rv)=2v. The kinetic energy of the sphere is the sum of its translational and rotational kinetic energies: KEs=21m1vs2+21Isωs2 KEs=21m1(2v)2+21(52m1R2)(2Rv)2 KEs=21m14v2+51m1R24R2v2 KEs=81m1v2+201m1v2=(405+2)m1v2=407m1v2 Substitute m1=4m: KEs=407(4m)v2=107mv2
-
Kinetic Energy of the Cylinder (KEc): The cylinder has mass m2=5m and radius R. It is a solid cylinder, so its moment of inertia about its center of mass is Ic=21m2R2. Let vc be the translational speed of the cylinder's center of mass and ωc be its angular speed. Similar to the sphere, the no-slip condition at the rod-cylinder contact means the top point of the cylinder has speed v: vc+Rωc=v (Equation 3). And the no-slip condition at the cylinder-ground contact means the bottom point of the cylinder has zero speed: vc−Rωc=0⇒vc=Rωc (Equation 4). Substituting (Equation 4) into (Equation 3): Rωc+Rωc=v⇒2Rωc=v⇒ωc=2Rv. Then, vc=R(2Rv)=2v. The kinetic energy of the cylinder is the sum of its translational and rotational kinetic energies: KEc=21m2vc2+21Icωc2 KEc=21m2(2v)2+21(21m2R2)(2Rv)2 KEc=21m24v2+41m2R24R2v2 KEc=81m2v2+161m2v2=(162+1)m2v2=163m2v2 Substitute m2=5m: KEc=163(5m)v2=1615mv2
-
Total Kinetic Energy of the System (KEtotal): The total kinetic energy is the sum of the kinetic energies of the rod, sphere, and cylinder: KEtotal=KErod+KEs+KEc KEtotal=21mv2+107mv2+1615mv2 Factor out mv2: KEtotal=mv2(21+107+1615) Find a common denominator for 2, 10, and 16, which is 80: KEtotal=mv2(8040+807×8+8015×5) KEtotal=mv2(8040+8056+8075) KEtotal=mv2(8040+56+75) KEtotal=80171mv2
The final answer is 80171mv2.
Explanation of the solution:
- Rod's KE: Calculated as pure translational KE: KErod=21mv2.
- Sphere's KE: Calculated as combined translational and rotational KE. No-slip conditions at the rod-sphere interface (vtop=v) and sphere-ground interface (vbottom=0) were used to find the sphere's center of mass velocity (vs=v/2) and angular velocity (ωs=v/(2R)). Moment of inertia for a solid sphere Is=52m1R2 was used. KEs=107mv2.
- Cylinder's KE: Calculated similarly to the sphere. No-slip conditions yielded cylinder's center of mass velocity (vc=v/2) and angular velocity (ωc=v/(2R)). Moment of inertia for a solid cylinder Ic=21m2R2 was used. KEc=1615mv2.
- Total KE: Sum of individual kinetic energies, resulting in 80171mv2.