Question
Question: At a particular instant of time, position vector $\overrightarrow{r}$, velocity vector $\overrightar...
At a particular instant of time, position vector r, velocity vector v and angular position θ of a particle traversing a path AB are shown in the figure. Here ϕ is the angle made by the velocity vector with the positive x-axis. Which of the following statements is/are correct?
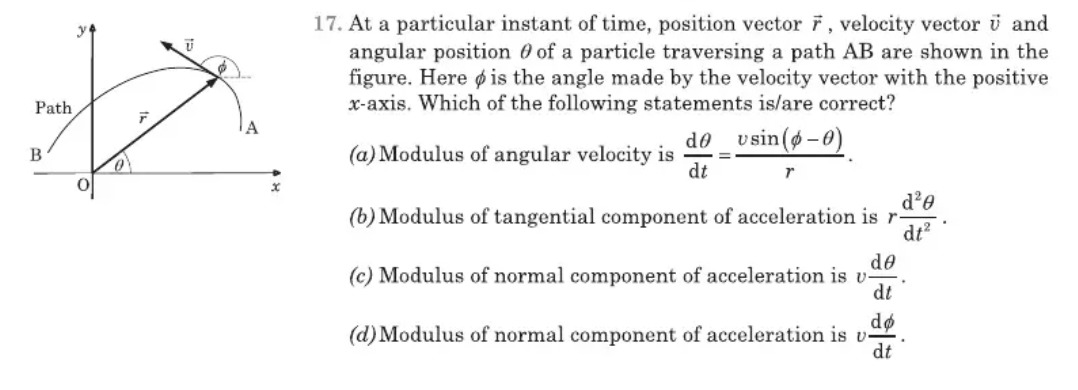
Modulus of angular velocity is dtdθ=rvsin(ϕ−θ).
Modulus of tangential component of acceleration is rdt2d2θ.
Modulus of normal component of acceleration is vdtdθ.
Modulus of normal component of acceleration is vdtdϕ.
(a), (d)
Solution
Let's analyze each statement based on the principles of kinematics in curvilinear motion.
Given:
- Position vector r with magnitude r=∣r∣ and angle θ with the positive x-axis.
- Velocity vector v with magnitude v=∣v∣ and angle ϕ with the positive x-axis.
Analysis of Statement (a): Modulus of angular velocity is dtdθ=rvsin(ϕ−θ).
The angular velocity of the position vector r is ω=dtdθ. The velocity vector v can be resolved into two components relative to the position vector r:
- Radial component (vr): Along the direction of r.
- Transverse component (vθ): Perpendicular to r.
From the figure, the angle between the position vector r (at angle θ with x-axis) and the velocity vector v (at angle ϕ with x-axis) is α=ϕ−θ.
The transverse component of velocity vθ is given by: vθ=vsin(ϕ−θ)
In polar coordinates, the transverse component of velocity is also expressed as: vθ=rdtdθ
Equating these two expressions for vθ: rdtdθ=vsin(ϕ−θ)
Therefore, the modulus of angular velocity is: dtdθ=rvsin(ϕ−θ) Statement (a) is correct.
Analysis of Statement (b): Modulus of tangential component of acceleration is rdt2d2θ.
The tangential component of acceleration (at) is defined as the rate of change of the magnitude of velocity (speed): at=dtdv In polar coordinates, the speed v is given by v=(dtdr)2+(rdtdθ)2. So, at=dtd((dtdr)2+(rdtdθ)2).
The expression rdt2d2θ is only part of the transverse component of acceleration in polar coordinates (aθ=rdt2d2θ+2dtdrdtdθ). This statement would be true only for circular motion centered at the origin (where r is constant, so dtdr=0, and v=rdtdθ, making at=dtd(rdtdθ)=rdt2d2θ). However, the problem describes a general path AB. For a general path, r can change, and at is not simply rdt2d2θ.
Statement (b) is incorrect.
Analysis of Statement (c): Modulus of normal component of acceleration is vdtdθ.
The normal component of acceleration (an) is related to the rate of change of the direction of the velocity vector. From statement (a), we know dtdθ=rvsin(ϕ−θ). So, vdtdθ=v(rvsin(ϕ−θ))=rv2sin(ϕ−θ).
The general expression for the normal component of acceleration is an=ρv2, where ρ is the radius of curvature. Another common expression for an is vdtdϕ, where dtdϕ is the rate of change of the direction of the velocity vector. The angular velocity of the position vector dtdθ and the angular velocity of the velocity vector dtdϕ are generally not equal for a general curvilinear motion. They are equal only for circular motion centered at the origin. For example, in a straight line motion not passing through the origin, ϕ is constant, so dtdϕ=0, leading to an=0. However, θ would be changing, so dtdθ=0, which would incorrectly imply a non-zero normal acceleration.
Statement (c) is incorrect.
Analysis of Statement (d): Modulus of normal component of acceleration is vdtdϕ.
The acceleration vector a can be decomposed into tangential and normal components: a=ate^t+ane^n where e^t is the unit tangent vector (in the direction of v) and e^n is the unit normal vector (perpendicular to e^t, pointing towards the center of curvature).
The velocity vector is v=ve^t. Differentiating with respect to time: a=dtdv=dtd(ve^t)=dtdve^t+vdtde^t The unit tangent vector e^t changes its direction as the particle moves along the path. If ϕ is the angle e^t makes with the x-axis, then: e^t=cosϕi^+sinϕj^ dtde^t=(−sinϕi^+cosϕj^)dtdϕ The vector (−sinϕi^+cosϕj^) is the unit normal vector e^n. So, dtde^t=dtdϕe^n.
Substituting this back into the acceleration equation: a=dtdve^t+vdtdϕe^n Comparing this with a=ate^t+ane^n, we identify: at=dtdv (tangential acceleration) an=vdtdϕ (normal acceleration)
Statement (d) is correct.
Conclusion: Statements (a) and (d) are correct.