Question
Question: Derive equation of torque acting on rectangular current carrying coil kept in uniform magnetic field...
Derive equation of torque acting on rectangular current carrying coil kept in uniform magnetic field.
Solution
In this question we have been asked to derive the equation for torque for a rectangular current carrying coil placed in a uniform magnetic field. To solve this question, we shall first find the forces acting on each arm. We know that torque is given as the product of force and radius. Therefore, we will be using this to solve the given question.
Formula used:
τ=rFsinθ
Complete answer:
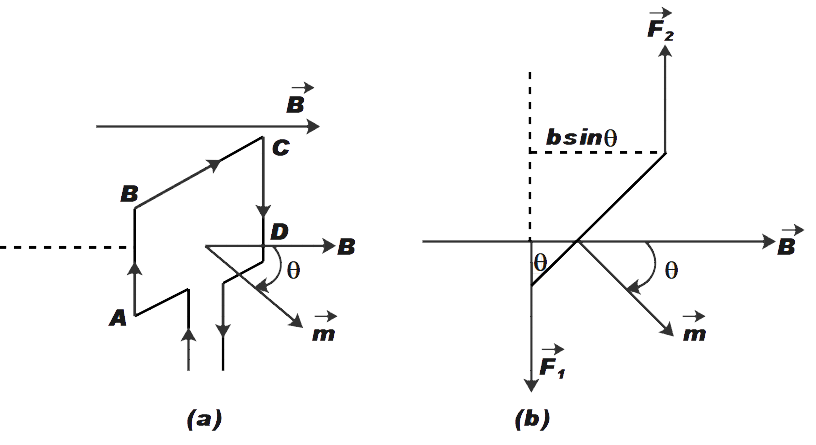
Let us consider a rectangular loop ABCD as shown in the figure (a) above. Let the dimensions of the loop be l and b. There is a steady current in the loop. This loop is placed in the uniform magnetic field as shown.
We know that,
The force on arm BC and AD be FAB and FAD respectively. These forces are equal and opposite and act along the axis of the coil. Therefore, these forces will cancel each other out.
Similarly,
The forces FABand FCDon arm AB and CD are also equal and opposite. Since these forces are not collinear, they act as a couple.
Therefore, the magnitude of torque can be given as,
τ=FAB+2bsinθ+FCD2bsinθ
Now, we know that
∣FAB∣=∣FCD∣=BIl
Therefore, we can say that,
τ=BIl×bsinθ
On solving,
We get,
τ=BI(lb)sinθ
Now we know that A=l×b
Therefore,
τ=BI×A×sinθ
We also know that,
m=I∣A∣
Therefore,
τ=mBsinθ
The above equation in vector form can be written as,
τ=m×B
Note:
Torque is the measure of the force that causes an object to rotate around an axis. Torque is similar to force. As the force is responsible for linear acceleration, torque is responsible for the angular acceleration. The concept of torque originated when Archimedes made use of levers for moving objects. The point about which the object rotates is called pivot point.