Question
Question: Two block of masses $m_1$ and $m_2$ are connected with the help of a spring of spring constant k ini...
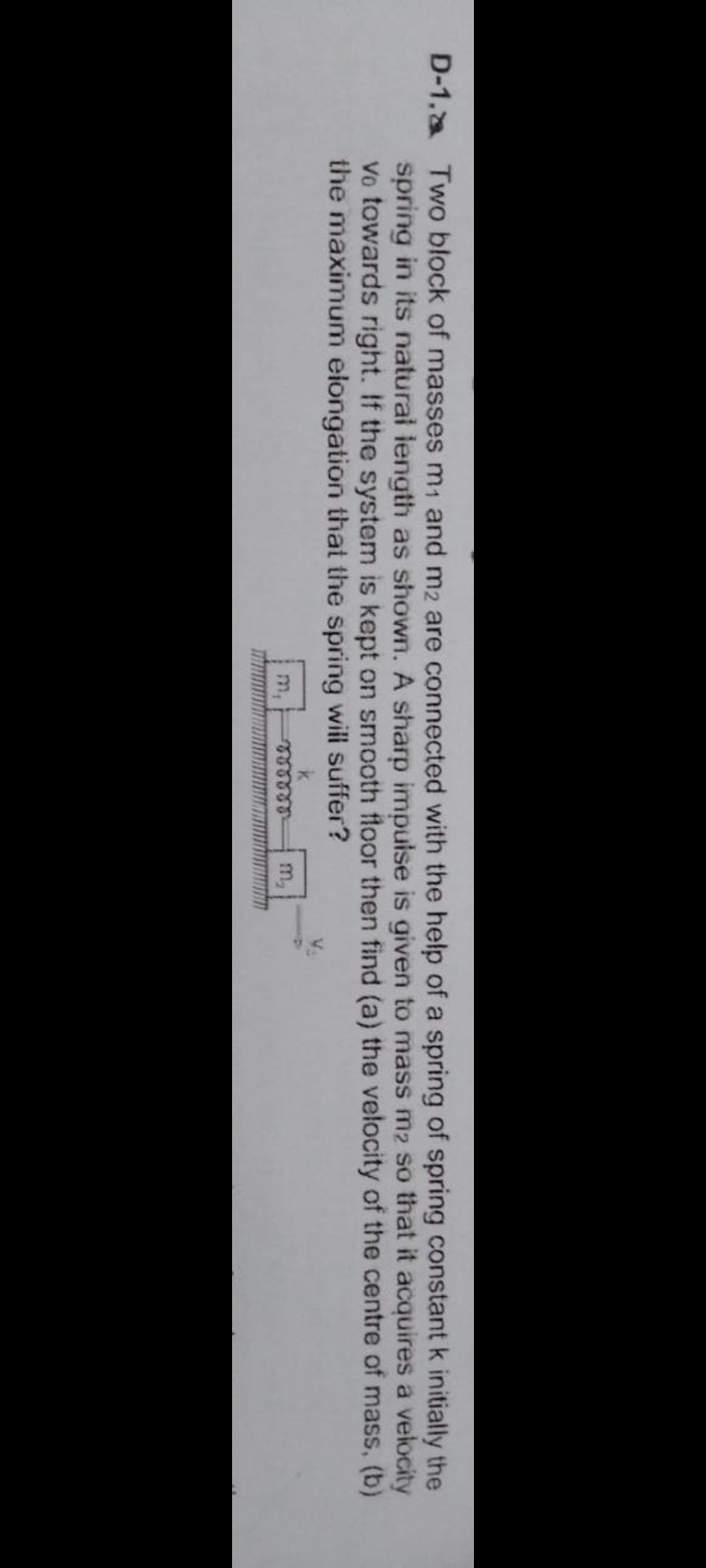
Two block of masses m1 and m2 are connected with the help of a spring of spring constant k initially the spring in its natural length as shown. A sharp impulse is given to mass m2 so that it acquires a velocity v0 towards right. If the system is kept on smooth floor then find (a) the velocity of the centre of mass, (b) the maximum elongation that the spring will suffer?
(a) m1+m2m2v0, (b) v0k(m1+m2)m1m2
(a) m1+m2m2v0, (b) v0k(m1+m2)m1m2
Solution
The system consists of two blocks of masses m1 and m2 connected by a spring of spring constant k. The system is on a smooth floor. Initially, the spring is at its natural length. A sharp impulse is given to mass m2 so that it acquires a velocity v0 towards right.
(a) The velocity of the centre of mass:
The total external force on the system in the horizontal direction is zero after the initial impulse. Therefore, the total linear momentum of the system in the horizontal direction is conserved.
Before the impulse, both masses are at rest, so the initial total momentum is Pi=m1(0)+m2(0)=0.
Immediately after the impulse, mass m1 is still at rest (v1=0) and mass m2 has velocity v0 (v2=v0). The total momentum of the system immediately after the impulse is Pf=m1(0)+m2(v0)=m2v0.
The velocity of the centre of mass is given by VCM=MtotalPtotal, where Mtotal=m1+m2.
Immediately after the impulse, the velocity of the centre of mass is VCM=m1+m2m2v0.
Since there are no external horizontal forces after the impulse, the velocity of the centre of mass remains constant.
Thus, the velocity of the centre of mass is VCM=m1+m2m2v0.
(b) The maximum elongation that the spring will suffer:
The maximum elongation of the spring occurs when the relative velocity between the two blocks is momentarily zero. At this moment, both blocks move with the same velocity. Since the velocity of the centre of mass is constant, this common velocity must be equal to the velocity of the centre of mass, VCM.
We can use the conservation of energy. The total mechanical energy of the system (kinetic energy + potential energy of the spring) is conserved because the only force doing work after the impulse is the conservative spring force.
Let the initial state be immediately after the impulse, and the final state be when the spring has maximum elongation.
Initial state:
Velocity of m1, v1i=0.
Velocity of m2, v2i=v0.
Spring is at natural length, so potential energy Ui=0.
Initial kinetic energy Ki=21m1v1i2+21m2v2i2=21m1(0)2+21m2v02=21m2v02.
Total initial energy Ei=Ki+Ui=21m2v02.
Final state (maximum elongation xmax):
Velocity of m1, v1f=VCM=m1+m2m2v0.
Velocity of m2, v2f=VCM=m1+m2m2v0.
Spring is elongated by xmax, so potential energy Uf=21kxmax2.
Final kinetic energy Kf=21m1v1f2+21m2v2f2=21m1(m1+m2m2v0)2+21m2(m1+m2m2v0)2.
Kf=21(m1+m2)(m1+m2m2v0)2=21(m1+m2)(m1+m2)2m22v02=21m1+m2m22v02.
Total final energy Ef=Kf+Uf=21m1+m2m22v02+21kxmax2.
By conservation of energy, Ei=Ef:
21m2v02=21m1+m2m22v02+21kxmax2.
m2v02=m1+m2m22v02+kxmax2.
kxmax2=m2v02−m1+m2m22v02=m2v02(1−m1+m2m2)=m2v02(m1+m2m1+m2−m2)=m2v02(m1+m2m1)=m1+m2m1m2v02.
xmax2=k(m1+m2)m1m2v02.
xmax=v0k(m1+m2)m1m2.
Alternatively, using relative motion and reduced mass μ=m1+m2m1m2:
The initial kinetic energy of relative motion is Kreli=21μvreli2, where vreli=v2i−v1i=v0−0=v0.
Kreli=21μv02=21m1+m2m1m2v02.
At maximum elongation, the relative velocity is vrelf=0, so Krelf=0.
The initial potential energy of the spring is Ui=0.
The final potential energy of the spring is Uf=21kxmax2.
The energy associated with the relative motion and spring potential energy is conserved: Kreli+Ui=Krelf+Uf.
21μv02+0=0+21kxmax2.
21m1+m2m1m2v02=21kxmax2.
xmax2=k(m1+m2)m1m2v02.
xmax=v0k(m1+m2)m1m2.