Question
Question: A small block is placed on the top of a frictionless hemisphere of radius r. The hemisphere is place...
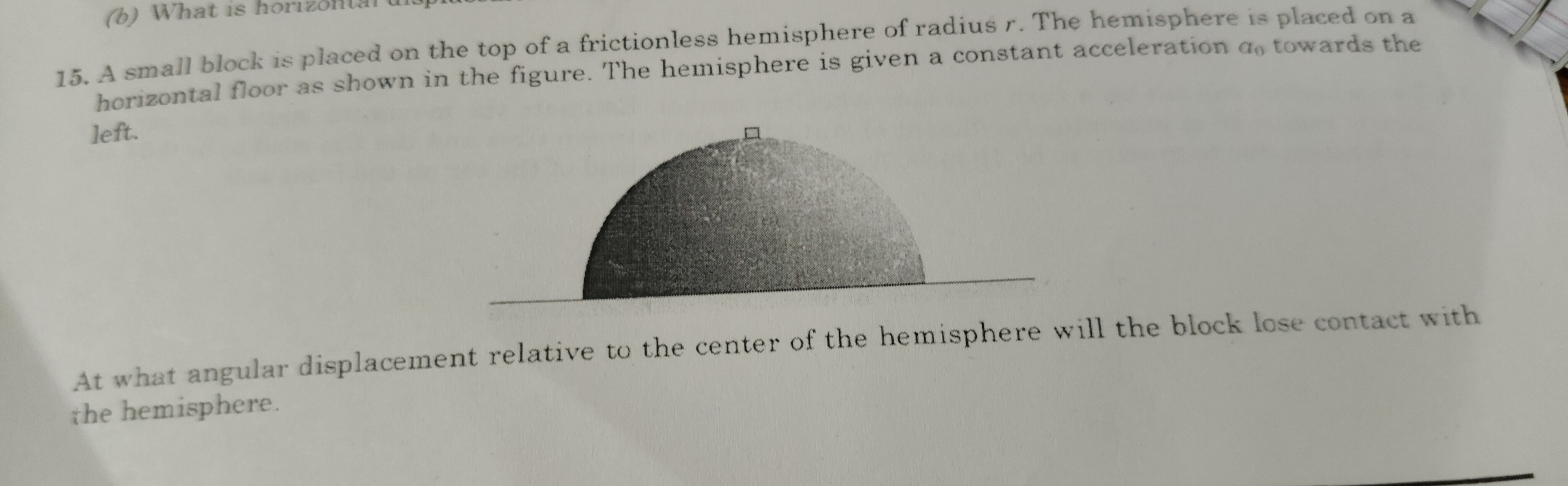
A small block is placed on the top of a frictionless hemisphere of radius r. The hemisphere is placed on a horizontal floor as shown in the figure. The hemisphere is given a constant acceleration a0 towards the left.
At what angular displacement relative to the center of the hemisphere will the block lose contact with the hemisphere.
θ = arccos[(6g^2 + a_0 sqrt(5g^2 + a_0^2)) / (9g^2 + a_0^2)]
Solution
To determine the angular displacement at which the block loses contact with the hemisphere, we will analyze the forces acting on the block in the non-inertial frame of reference of the hemisphere.
Let:
mbe the mass of the block.rbe the radius of the hemisphere.gbe the acceleration due to gravity.a_0be the constant acceleration of the hemisphere towards the left.θbe the angular displacement of the block from the vertical (measured from the top of the hemisphere).
1. Free Body Diagram and Equations of Motion in the Non-Inertial Frame:
In the frame of reference of the accelerating hemisphere, a pseudo force F_pseudo = ma_0 acts on the block in the direction opposite to the hemisphere's acceleration, i.e., towards the right.
Consider the block at an angular position θ from the vertical. We resolve forces along the radial and tangential directions.
-
Radial Direction (towards the center of the hemisphere):
The forces acting radially are the component of gravity
mg cosθ, the component of the pseudo forcema_0 sinθ, and the normal forceN(acting outwards). The net radial force provides the centripetal accelerationmv^2/r. Taking the inward radial direction as positive:mg cosθ + ma_0 sinθ - N = mv^2/rWhen the block loses contact, the normal forceN = 0. So, the condition for losing contact is:mg cosθ + ma_0 sinθ = mv^2/r(Equation 1) -
Tangential Direction (perpendicular to the radius, along the direction of motion):
The forces acting tangentially are the component of gravity
mg sinθand the component of the pseudo forcema_0 cosθ. These forces cause the block to accelerate tangentially. Taking the tangential direction downwards as positive:mg sinθ + ma_0 cosθ = m (dv/dt)
2. Work-Energy Theorem to find v^2:
We can use the work-energy theorem in the non-inertial frame. The work done by all forces (including pseudo forces) equals the change in kinetic energy.
Initial state: Block at rest on top, v_initial = 0.
Final state: Block at angle θ with velocity v.
-
Work done by gravity (
W_g):The vertical distance fallen by the block is
h = r - r cosθ = r(1 - cosθ).W_g = mg * h = mgr(1 - cosθ) -
Work done by pseudo force (
W_pseudo):The pseudo force
ma_0acts horizontally to the right. The horizontal displacement of the block isx = r sinθ(to the right).W_pseudo = F_pseudo * x = ma_0 (r sinθ) -
Work done by normal force:
W_N = 0(asNis perpendicular to displacement).
According to the work-energy theorem: W_g + W_pseudo = ΔK
mgr(1 - cosθ) + ma_0 r sinθ = (1/2)mv^2 - 0
Divide by m:
gr(1 - cosθ) + a_0 r sinθ = (1/2)v^2
v^2 = 2gr(1 - cosθ) + 2a_0 r sinθ (Equation 2)
3. Substitute v^2 into the Contact Condition:
Substitute Equation 2 into Equation 1:
mg cosθ + ma_0 sinθ = (m/r) * [2gr(1 - cosθ) + 2a_0 r sinθ]
Divide by m:
g cosθ + a_0 sinθ = (1/r) * [2gr(1 - cosθ) + 2a_0 r sinθ]
g cosθ + a_0 sinθ = 2g(1 - cosθ) + 2a_0 sinθ
Rearrange the terms to solve for cosθ and sinθ:
g cosθ + 2g cosθ = 2g + 2a_0 sinθ - a_0 sinθ
3g cosθ = 2g + a_0 sinθ
3g cosθ - a_0 sinθ = 2g (Equation 3)
4. Solve for θ:
To solve this equation, we can express sinθ in terms of cosθ using sinθ = sqrt(1 - cos^2θ) (assuming θ is in the first quadrant, which is physically relevant for sliding down).
3g cosθ - 2g = a_0 sqrt(1 - cos^2θ)
Square both sides:
(3g cosθ - 2g)^2 = a_0^2 (1 - cos^2θ)
g^2 (3 cosθ - 2)^2 = a_0^2 (1 - cos^2θ)
g^2 (9 cos^2θ - 12 cosθ + 4) = a_0^2 - a_0^2 cos^2θ
9g^2 cos^2θ - 12g^2 cosθ + 4g^2 = a_0^2 - a_0^2 cos^2θ
Rearrange into a quadratic equation in cosθ:
(9g^2 + a_0^2) cos^2θ - 12g^2 cosθ + (4g^2 - a_0^2) = 0
Let x = cosθ. Using the quadratic formula x = [-B ± sqrt(B^2 - 4AC)] / 2A:
cosθ = [12g^2 ± sqrt((-12g^2)^2 - 4(9g^2 + a_0^2)(4g^2 - a_0^2))] / [2(9g^2 + a_0^2)]
cosθ = [12g^2 ± sqrt(144g^4 - 4(36g^4 - 9g^2a_0^2 + 4g^2a_0^2 - a_0^4))] / [2(9g^2 + a_0^2)]
cosθ = [12g^2 ± sqrt(144g^4 - 4(36g^4 - 5g^2a_0^2 - a_0^4))] / [2(9g^2 + a_0^2)]
cosθ = [12g^2 ± sqrt(144g^4 - 144g^4 + 20g^2a_0^2 + 4a_0^4)] / [2(9g^2 + a_0^2)]
cosθ = [12g^2 ± sqrt(4a_0^2(5g^2 + a_0^2))] / [2(9g^2 + a_0^2)]
cosθ = [12g^2 ± 2a_0 sqrt(5g^2 + a_0^2)] / [2(9g^2 + a_0^2)]
cosθ = [6g^2 ± a_0 sqrt(5g^2 + a_0^2)] / [9g^2 + a_0^2]
We must choose the sign that corresponds to the physical scenario.
From Equation 3, 3g cosθ = 2g + a_0 sinθ. Since a_0 > 0 and sinθ > 0 (for 0 < θ < 90°), it implies 3g cosθ > 2g, or cosθ > 2/3.
Let's check the two solutions for cosθ.
The positive sign + will result in a larger value of cosθ (hence smaller θ). The negative sign - will result in a smaller value of cosθ (hence larger θ).
For the block to slide down and then lose contact, θ must be positive.
If a_0 = 0, cosθ = 6g^2 / 9g^2 = 2/3. This is the standard result.
If a_0 > 0, the pseudo force ma_0 assists the block in sliding down. This means it will lose contact at an earlier angle (smaller θ, larger cosθ) compared to a_0 = 0.
Therefore, we choose the + sign to get cosθ > 2/3.
Thus, the angular displacement θ is given by:
cosθ = (6g^2 + a_0 sqrt(5g^2 + a_0^2)) / (9g^2 + a_0^2)
θ = arccos[(6g^2 + a_0 sqrt(5g^2 + a_0^2)) / (9g^2 + a_0^2)]