Question
Question: The block - disk system starts moving such that they are in contact throughout the motion. Coefficie...
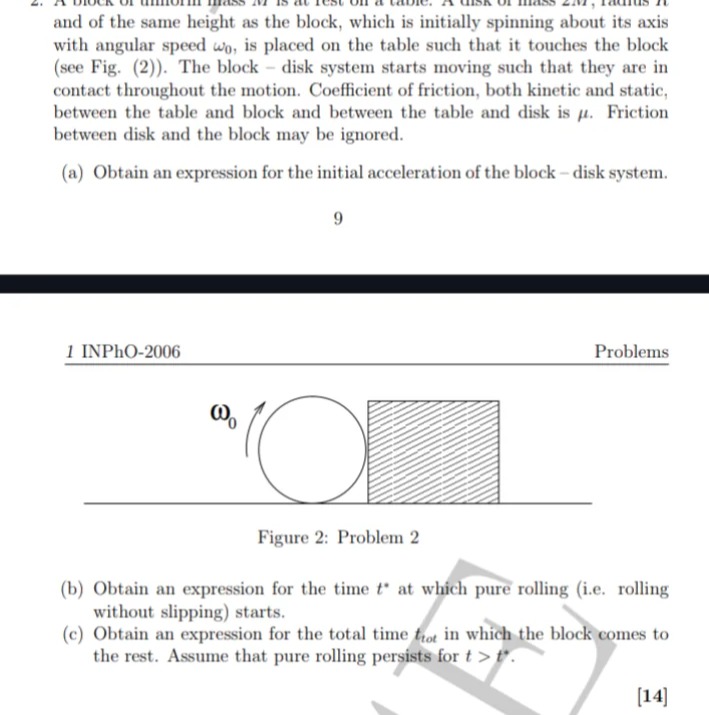
The block - disk system starts moving such that they are in contact throughout the motion. Coefficient of friction, both kinetic and static, between the table and block and between the table and disk is μ. Friction between disk and the block may be ignored.
(a) Obtain an expression for the initial acceleration of the block - disk system.
(b) Obtain an expression for the time t∗ at which pure rolling (i.e. rolling without slipping) starts.
(c) Obtain an expression for the total time ttot in which the block comes to the rest. Assume that pure rolling persists for t>t∗.
(a) The initial acceleration of the block-disk system is μg (magnitude). (b) The time t∗ at which pure rolling starts is 3μgRω0. (c) The total time ttot in which the block comes to rest is 3μg2Rω0.
Solution
(a) Initial acceleration of the block-disk system
Let M be the mass of the block and 2M be the mass of the disk. The radius of the disk is R. Initially, the disk is spinning with angular speed ω0.
When the disk is placed on the table, the point of contact has an initial velocity relative to the table. Assuming the positive direction is to the right, the velocity of the center of mass of the disk is vD=0, and the initial angular velocity of the disk is ω=ω0 (clockwise). The velocity of the contact point on the disk relative to the table is vcontact=vD+Rω (if ω is clockwise and vD is to the right, and we consider the velocity of the point on the disk relative to the center). More precisely, if the disk is spinning clockwise, the velocity of the bottom-most point of the disk relative to its center is Rω0 to the right. Since the center of mass is initially at rest, the initial velocity of the contact point relative to the table is Rω0 to the right.
This relative motion causes kinetic friction to act on the disk from the table, opposing this relative motion. Thus, the friction force fD on the disk acts to the left. The magnitude of the kinetic friction is fD=μND, where ND is the normal force on the disk. From vertical equilibrium, ND=2Mg. So, fD=μ(2Mg).
The equation of motion for the center of mass of the disk (taking right as positive) is: 2MaD=−fD 2MaD=−μ(2Mg) aD=−μg
Since the block and disk are in contact and move together, they have the same acceleration. Let aB=aD=a. The friction force on the block from the table, fB, causes its acceleration: MaB=fB Ma=fB
If the system moves to the left with acceleration a=−μg, then fB=M(−μg). This means the friction force fB on the block is also to the left. This is consistent with the block moving to the left. The magnitude of the initial acceleration of the block-disk system is ∣a∣=μg.
(b) Time t∗ at which pure rolling starts
Pure rolling occurs when the velocity of the point of contact of the disk with the table is zero relative to the table. The velocity of the contact point is vD+Rω (assuming vD is to the right and ω is clockwise magnitude). The condition for pure rolling is vD(t∗)+Rω(t∗)=0.
The acceleration of the disk's center of mass is aD=−μg. The angular acceleration of the disk is found from the torque due to friction: fDR=Iα. The moment of inertia of the disk is I=21(2M)R2=MR2. (−μ2Mg)R=MR2α α=−R2μg (The negative sign indicates that the clockwise rotation slows down if friction is to the left).
The velocity of the disk's center of mass at time t is: vD(t)=vD(0)+aDt=0−μgt=−μgt
The angular velocity of the disk at time t is: ω(t)=ω(0)+αt=ω0−R2μgt
The condition for pure rolling at time t∗ is vD(t∗)+Rω(t∗)=0: (−μgt∗)+R(ω0−R2μgt∗)=0 −μgt∗+Rω0−2μgt∗=0 Rω0=3μgt∗ t∗=3μgRω0
(c) Total time ttot in which the block comes to the rest
For t>t∗, the motion is pure rolling. This means the velocity of the contact point is zero relative to the table, so vD=−Rω (if vD is to the right and ω is clockwise magnitude). Since friction between the disk and the block is ignored, and they are in contact, they move together. Thus, vB=vD and aB=aD=a. The friction force on the block from the table is fB=Ma. This is static friction. The friction force on the disk from the table is fD=2Ma. This is static friction. The total friction from the table is ftable=fB+fD=3Ma. This static friction must satisfy ∣ftable∣≤μNtotal=μ(Mg+2Mg)=3μMg. So, ∣3Ma∣≤3μMg, which implies ∣a∣≤μg.
At time t∗, the velocity of the disk is vD(t∗)=−μgt∗=−μg(3μgRω0)=−3Rω0. Since vB=vD, the initial velocity of the block at t∗ is vB(t∗)=−3Rω0.
The block comes to rest, meaning its final velocity is vB(ttot)=0. For the block to stop, it must accelerate to the right (positive acceleration). So, a>0. The friction forces fB and fD are to the right, causing this acceleration. Assuming the acceleration a during this pure rolling phase is constant and at its maximum possible value to cause the motion to stop, we consider the maximum available static friction. The maximum possible acceleration is a=μg.
Using the equation of motion for the block during this phase: vB(t)=vB(t∗)+a(t−t∗) We want to find ttot when vB(ttot)=0. 0=−3Rω0+a(ttot−t∗) Assuming a=μg: 0=−3Rω0+μg(ttot−t∗) μg(ttot−t∗)=3Rω0 ttot−t∗=3μgRω0
The total time is ttot=t∗+(ttot−t∗)=3μgRω0+3μgRω0=3μg2Rω0.