Question
Question: An L-shaped object, made of thin rods of uniform mass density, is suspended with a string as shown i...
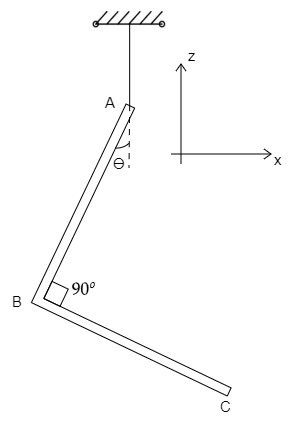
An L-shaped object, made of thin rods of uniform mass density, is suspended with a string as shown in figure. If AB=BC, and the angle made by AB=B, and the angle made by AB with downward vertical is θ, then
A. tanθ=32
B. tanθ=31
C. tanθ=21
D. tanθ=231
Solution
Since, the object has uniform mass. Hence, the weight of the two-section is acted downwards. By calculating the moment at the point, A due to the weight of the rods. Then, the value of the tanθ can be calculated. Also, the rod is in equilibrium, so the moment due to the two forces are equal.
Formula used:
Moment, M=F×d
Where F is the force and d is the perpendicular distance.
In a right-angled triangle,
sinθ = HypotenuseOpposite side
cosθ = HypotenuseAdjacent side
Complete step by step answer:
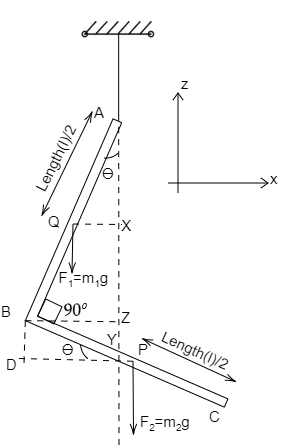
The L-shaped rod is considered to be two parts as AB and BC, both have the same mass m and P, Q are the center points of the rod BC and AB respectively.
The rod is in equilibrium. Thus, the total moment at hanged point A is zero.
M1+M2=0
Where, M1 is the moment due to the weight of the rod AB and M2 is the moment due to the weight of the rod BC.
Since the moment M2 is in a clockwise direction, so it is negative.
M1+(−M2)=0
⇒M1=M2
By applying moment formula, we get
F1×QX=F2×PY.........................................(1)
Where, F1 is the force due to the self-weight of the rod AB, F2 is the force due to the self-weight of the rod BC, QX is the perpendicular distance between F1 and the point A and PY is the perpendicular distance between F2 and the point A.
Since, F=mg
Where m is the mass of the body and g is the acceleration due to gravity.
Thus,
⇒F1=m1g and F2=m2g
Here, the rod AB and BC has the same mass. So, m=m1=m2 and also F1=F2=F=mg
By applying trigonometric function in the triangle AQX,
sinθ=AQQX=(2l)QX⇒QX=2l×sinθ
By applying trigonometric function in the triangle PBD,
cosθ=PBPD=(2l)PD⇒PD=2l×cosθ
By applying trigonometric function in the triangle ABZ,
sinθ=ABBZ=lBZ⇒BZ=l×sinθ
Since, BZ=DY=l×sinθ
Thus, from the diagram, we get
PY=PD−DY
⇒PY=(2l×cosθ)−(l×sinθ)
By substituting the values of F1, F2, QX and PY in the equation (1), we get
mg×(2lsinθ)=mg×(2lcosθ−lsinθ)
By cancelling common terms on both sides,
⇒(2lsinθ)=(2lcosθ−lsinθ)
By rearranging the sin terms to one side, we get
⇒2lsinθ+lsinθ=2lcosθ
By performing arithmetic operation, we get
⇒23lsinθ=2lcosθ
Rearranging the terms, we get
⇒cosθsinθ=2l×3l2
Since, tanθ=cosθsinθ
By substituting the above relation in the equation, we get
∴tanθ=31
Hence, the option (B) is correct.
Note:
The weight of the two rods tends the whole setup to be in equilibrium. The torque developed by the two rods is in the opposite direction. Thus, the Torque cancels each other to make the rod in equilibrium. If any additional force is applied to the rod, it experiences an additional torque. Then, the rod tends to move in any of the directions based on the direction of force applied.