Question
Question: A cubical block of mass m and side length b is placed on a smooth floor. A smooth and rigid rod of l...
A cubical block of mass m and side length b is placed on a smooth floor. A smooth and rigid rod of length L and with negligible mass is leaning against the block. A sphere of mass M is attached to the upper end of the rod. The lower end of the rod is hinged at point O. The rod can rotate freely around point O in the vertical plane as shown in the figure. Initially the angle between the rod and the floor is α, while the system is at rest. Sometime after releasing, the angle between the rod and the floor is β. Which of the following is/are CORRECT?
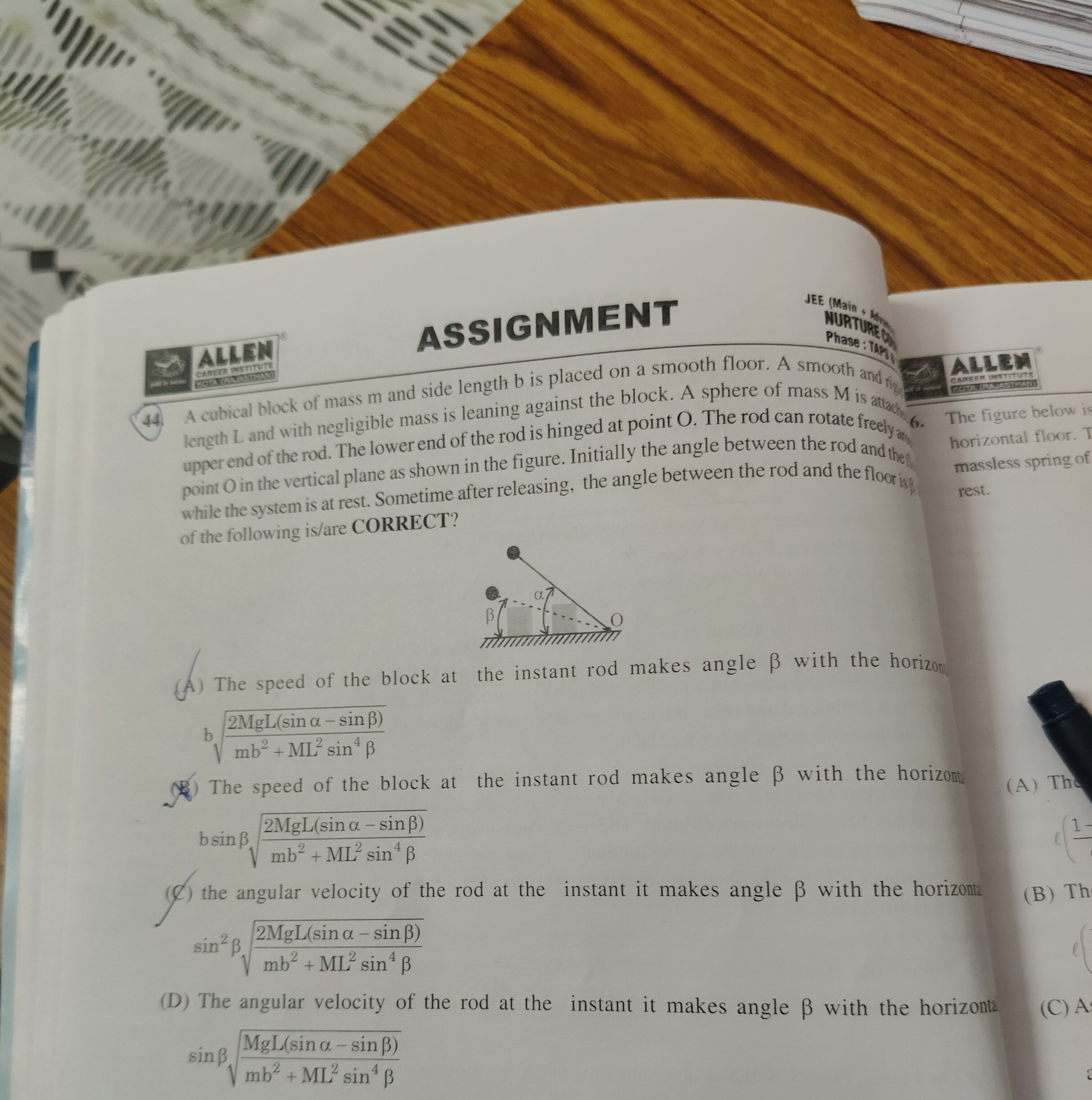
The speed of the block at the instant rod makes angle β with the horizon bmb2+ML2sin4β2MgL(sinα−sinβ)
The speed of the block at the instant rod makes angle β with the horizonta bsinβmb2+ML2sin4β2MgL(sinα−sinβ)
the angular velocity of the rod at the instant it makes angle β with the horizonta sin2βmb2+ML2sin4β2MgL(sinα−sinβ)
The angular velocity of the rod at the instant it makes angle β with the horizonta sinβmb2+ML2sin4βMgL(sinα−sinβ)
A, C
Solution
The problem involves a system where mechanical energy is conserved because all forces doing work are conservative (gravity) or do no work (normal forces on smooth surfaces, hinge force).
1. Define System and Initial/Final States:
- System: Cubical block (mass
m), rod (negligible mass), sphere (massM). - Initial state: Rod at angle
αwith the horizontal, system at rest. - Final state: Rod at angle
βwith the horizontal.
2. Establish Geometric Constraint:
Let x be the horizontal distance from the hinge O to the right face of the block (where the rod touches its top corner).
The height of the contact point is b.
From the geometry of the setup (refer to the figure), the rod touches the top corner of the block. Let L_c be the length of the rod from O to the contact point.
Then, L_c \sin \theta = b (vertical height)
And L_c \cos \theta = x (horizontal distance)
From these two equations, we can eliminate L_c:
x = \frac{b}{\sin \theta} \cos \theta = b \cot \theta
3. Relate Velocities:
The speed of the block v_block is |dx/dt|.
\frac{dx}{dt} = \frac{d}{dt} (b \cot \theta) = b (-\csc^2 \theta) \frac{d\theta}{dt}
Let ω = |dθ/dt| be the angular velocity of the rod. As the rod falls, θ decreases, so dθ/dt is negative. We are interested in the magnitude of velocity.
v_block = b \csc^2 \theta \cdot \omega
At the instant the angle is β,
v_block = b \csc^2 \beta \cdot \omega
This can also be written as: \omega = \frac{v_block \sin^2 \beta}{b} (Equation 1)
4. Apply Conservation of Mechanical Energy:
Initial mechanical energy E_i = KE_i + PE_i
Final mechanical energy E_f = KE_f + PE_f
Since the system is released from rest, KE_i = 0.
The potential energy is due to the sphere. The height of the sphere at angle θ is L \sin \theta.
PE_i = M g L \sin \alpha
At the final state (angle β):
KE_f = \frac{1}{2} m v_{block}^2 + \frac{1}{2} M v_{sphere}^2
The speed of the sphere is v_{sphere} = L \omega.
KE_f = \frac{1}{2} m v_{block}^2 + \frac{1}{2} M (L \omega)^2
PE_f = M g L \sin \beta
By conservation of mechanical energy: E_i = E_f
0 + M g L \sin \alpha = \frac{1}{2} m v_{block}^2 + \frac{1}{2} M L^2 \omega^2 + M g L \sin \beta
M g L (\sin \alpha - \sin \beta) = \frac{1}{2} m v_{block}^2 + \frac{1}{2} M L^2 \omega^2 (Equation 2)
5. Solve for v_block:
Substitute \omega = \frac{v_block \sin^2 \beta}{b} from Equation 1 into Equation 2:
M g L (\sin \alpha - \sin \beta) = \frac{1}{2} m v_{block}^2 + \frac{1}{2} M L^2 \left(\frac{v_block \sin^2 \beta}{b}\right)^2
M g L (\sin \alpha - \sin \beta) = \frac{1}{2} m v_{block}^2 + \frac{1}{2} M L^2 \frac{v_{block}^2 \sin^4 \beta}{b^2}
M g L (\sin \alpha - \sin \beta) = \frac{1}{2} v_{block}^2 \left(m + \frac{M L^2 \sin^4 \beta}{b^2}\right)
M g L (\sin \alpha - \sin \beta) = \frac{1}{2} v_{block}^2 \left(\frac{m b^2 + M L^2 \sin^4 \beta}{b^2}\right)
v_{block}^2 = \frac{2 M g L (\sin \alpha - \sin \beta) b^2}{m b^2 + M L^2 \sin^4 \beta}
v_{block} = b \sqrt{\frac{2 M g L (\sin \alpha - \sin \beta)}{m b^2 + M L^2 \sin^4 \beta}}
This matches option (A).
6. Solve for ω:
Substitute v_block = \frac{b \omega}{\sin^2 \beta} from Equation 1 into Equation 2:
M g L (\sin \alpha - \sin \beta) = \frac{1}{2} m \left(\frac{b \omega}{\sin^2 \beta}\right)^2 + \frac{1}{2} M L^2 \omega^2
M g L (\sin \alpha - \sin \beta) = \frac{1}{2} m \frac{b^2 \omega^2}{\sin^4 \beta} + \frac{1}{2} M L^2 \omega^2
M g L (\sin \alpha - \sin \beta) = \frac{1}{2} \omega^2 \left(\frac{m b^2}{\sin^4 \beta} + M L^2\right)
M g L (\sin \alpha - \sin \beta) = \frac{1}{2} \omega^2 \left(\frac{m b^2 + M L^2 \sin^4 \beta}{\sin^4 \beta}\right)
\omega^2 = \frac{2 M g L (\sin \alpha - \sin \beta) \sin^4 \beta}{m b^2 + M L^2 \sin^4 \beta}
\omega = \sin^2 \beta \sqrt{\frac{2 M g L (\sin \alpha - \sin \beta)}{m b^2 + M L^2 \sin^4 \beta}}
This matches option (C).
Therefore, both options (A) and (C) are correct.