Question
Question: A vector of length \(l\) is turned through the angle \(\theta \) about its tail. What is the change ...
A vector of length l is turned through the angle θ about its tail. What is the change in the position vector of its head?
Solution
Here, we have two positions of the same vector. One is its initial position and the other is, when it is turned through an angle θ, about its tail. So, there will be a change in its head position. We need to find this change between initial and final position of head. We can use triangle law to determine this change.
Formula used:
$$$$ Δr=(A2+B2−2ABcosθ)
Complete answer:
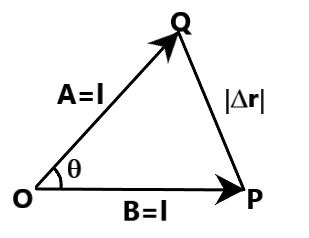
From the figure given above, we can understand that OP is the initial position vector of the head, with P being the head of the vector and O, its tail. Then, this vector is rotated over an angle θ, about its tail. Now, the position vector of head is represented as OQ, with Q being the head and O, its tail. Clearly, these two vectors form the two arms of a triangle OQP, as shown.
Now, we can use the triangular law of subtraction to find the change in position of head. Using this law, if two vectors are formed as two sides of a triangle, their difference is given by the third side, taken in the opposite direction. Hence, if Δr represents the magnitude of difference in position vectors of head, then, Δr is given by
Δr=(A2+B2−2ABcosθ)
where
Δr is the magnitude of difference in initial position vector and final position vector of head
A and Bare the magnitudes of initial and final position vectors of head
θ is the angle between initial position vector and final position vector of head
Let this be equation 1.
From the question, magnitudes of both vectors are given to be l. Therefore, using equation 1, we have
⇒Δr=(l2+l2−2l2cosθ)⇒Δr=(2l2−2l2cosθ)⇒Δr=2l2×(1−cosθ)⇒Δr=2l2(2sin22θ)
Since, 1−cosθ=2sin22θ
⇒Δr=(4l2sin22θ)⇒Δr=2lsin2θ
Therefore, the change in position is equal to 2lsin2θ.
Note:
There might be a tendency to use parallelogram law instead of triangular law. But we need to note that what is required is the change in position (distance), and not a resultant vector. The magnitude of resultant vector using parallelogram law is given by
Δr=(A2+B2+2ABcosθ)