Question
Question: A simple pendulum made up of light rod of length l and bob of mass m has a spring of force constant ...
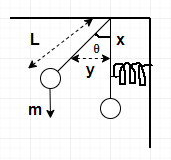
A simple pendulum made up of light rod of length l and bob of mass m has a spring of force constant K connected to it at a distance x below the point of suspension. Find the frequency of vibration of the system
Solution
From figure, we can infer that the pendulum has been displaced to an angle θ during vibration and stretches to a distance y. We can calculate the frequency by finding all the forces that act in this system. Using the angle θwe can resolve forces to its components as well.
Formula used:
Torque τ=r×F=rFsinθ where rthe distance is and Fis the force.
Complete step by step answer:
From the figure, the pendulum has displaced to a length y.
From given, figure we can say that y=xtanθ. When we consider the small right angled triangle with base x and height y.
For very small angles,
tanθsinθ∴y=xθ
Now, restoring force that acts on the spring= kθx
Torque=force×distance
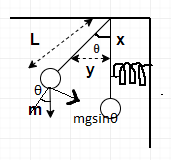
Consider the pendulum bob:
Gravitational force mg acts downwards on the pendulum bob.
Resolving mg, we get the component along the direction of force i.e. mgsinθ
L is the line of force.
Hence, torque by the bob= mgLsinθ
Summation of torque by the restoring force :
∑τ=−(mgLsinθ+kθx(x))(Since the torque by the restoring force acts along a distance x)
For small angles, sinθsinθ
Hence,