Question
Question: A round uniform body of radius \[R\], mass \[M\] , and moment of inertia \[I\], rolls down (without ...
A round uniform body of radius R, mass M , and moment of inertia I, rolls down (without slipping) an inclined plane making an angle with the horizontal. Then its acceleration is :
A.1+I/MR2gsinθ
B.1+MR2/Igsinθ
C.1−I/MR2gsinθ
D.1−MR2/Igsinθ
Solution
The frictional force is the force that restricts the motion of the body. To solve this question we need to first draw the free body diagram and mark all the forces that act upon the uniform body. And then we will use the torque formula and from that, we will find the frictional force. Then we need to substitute this in the equation of motion formula to find an equation for the acceleration of the body.
Complete answer:
The free-body diagram of the rotating body is given below.
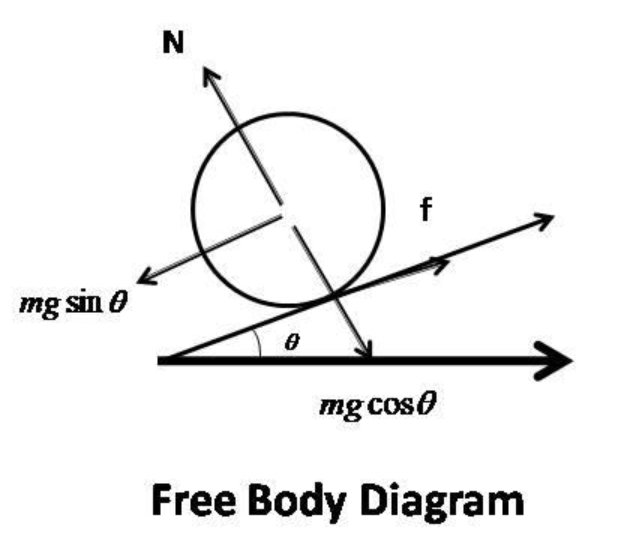
From the diagram, the equation of the motion can be written as,
⇒mgsinθ−f=ma ……… (1)
Here,
m is the mass of the body
mgsinθ is the horizontal component
f is the frictional force.
Now the torque acting on the body is given by,
⇒τ=f×R …… (2)
Equation (2) can also be written in terms of the moment of inertia as,
⇒τ=Iα ……. (3)
Here,
I is the moment of inertia
α is the angular acceleration
Equating equations (2) and (3)
⇒f×R=Iα
⇒f=RIα …… (4)
Also, the acceleration of the body is given as,
⇒a=αR …… (5)
Substituting equation (4) in (5) we get,
⇒f=RIα ….. (6)
⇒f=R2Ia
Substituting this in the equation of motion we get,
⇒mgsinθ−R2Ia=ma
⇒mgsinθ=ma+R2Ia
⇒a=1+I/mR2gsinθ
Therefore, the correct option is C.
Note:
We usually use the term torque when we study the entire rotating object. Torque is a measure of force that acts on an object and that causes the object to rotate. The object always rotates about an axis and this axis is called the pivot. The SI unit of torque is Nm. Torque can be categorized into two types one is static and the other is dynamic.