Question
Question: A non-conducting uniform rigid rod of mass \(m\) and length \(l\) can freely rotate about one of the...
A non-conducting uniform rigid rod of mass m and length l can freely rotate about one of the end in vertical plane. A small ball of mass m and charge q is fixed on other end and system is released from horizontal position at t=0 in uniform electric field E=2qmg directed horizontally.
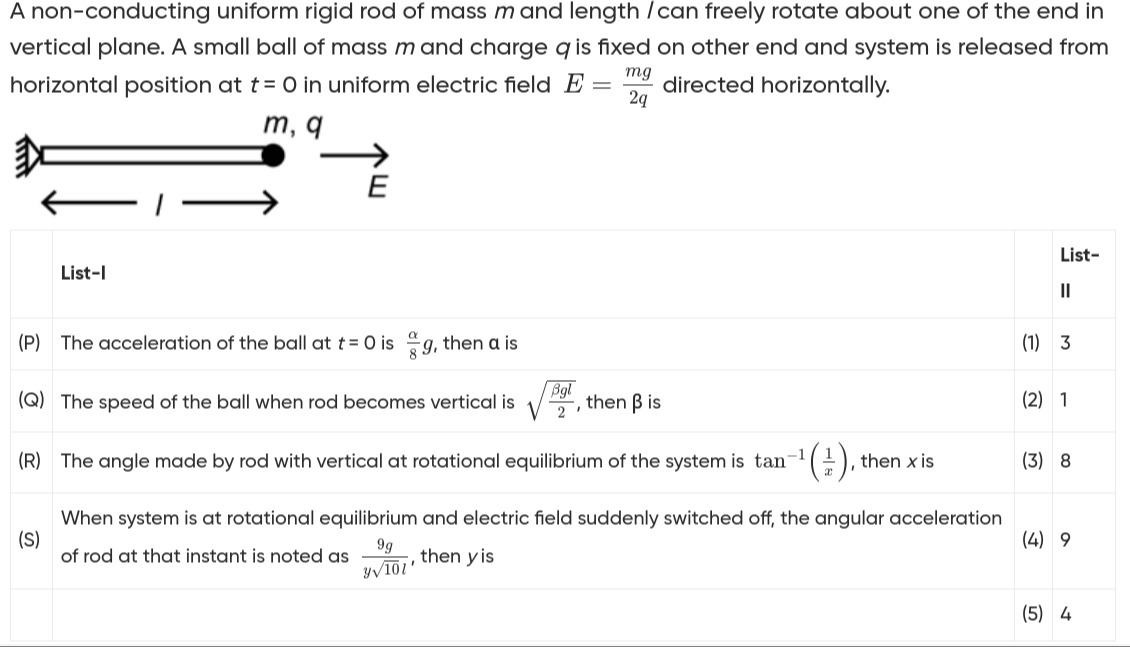
The acceleration of the ball at t=0 is 8αg, then α is
The speed of the ball when rod becomes vertical is 2βgl, then β is
The angle made by rod with vertical at rotational equilibrium of the system is tan−1(x1), then x is
When system is at rotational equilibrium and electric field suddenly switched off, the angular acceleration of rod at that instant is noted as y10l9g, then y is
P → 4, Q → 1, R → 1, S → 3
Solution
The problem involves a non-conducting uniform rigid rod with a charged ball attached to its end, rotating about a pivot in a uniform electric field. We need to calculate several quantities related to its motion and equilibrium.
Given parameters:
- Mass of rod = m
- Length of rod = l
- Mass of ball = m
- Charge of ball = q
- Electric field = E=2qmg, directed horizontally.
- Pivot at one end of the rod.
- System released from horizontal position at t=0.
1. Moment of Inertia of the System (I) about the pivot: The total moment of inertia is the sum of the moment of inertia of the rod about its end and the moment of inertia of the ball about the pivot.
- Moment of inertia of uniform rod about its end: Irod=31ml2.
- Moment of inertia of ball (point mass) about the pivot: Iball=ml2.
- Total moment of inertia: I=Irod+Iball=31ml2+ml2=34ml2.
Part (P): The acceleration of the ball at t=0.
At t=0, the rod is horizontal. Let's assume the pivot is at the origin (0,0) and the rod extends along the positive x-axis.
- Center of mass (CM) of the rod is at (l/2,0).
- The ball is at (l,0).
Forces and Torques at t=0:
- Gravitational force on the rod: Fg,rod=mg, acting downwards at (l/2,0).
- Torque due to gravity on rod: τg,rod=mg×(l/2)=2mgl (clockwise).
- Gravitational force on the ball: Fg,ball=mg, acting downwards at (l,0).
- Torque due to gravity on ball: τg,ball=mg×l=mgl (clockwise).
- Electric force on the ball: Fe=qE=q(2qmg)=2mg. This force acts horizontally to the right at (l,0).
- Since the force is horizontal and acts at the end of the horizontal rod, its line of action passes through the pivot. Therefore, the torque due to the electric force about the pivot is τe=0.
Total net torque at t=0: τnet=τg,rod+τg,ball+τe=2mgl+mgl+0=23mgl.
Using Newton's second law for rotation: τnet=Iα0. 23mgl=(34ml2)α0 α0=4ml2/33mgl/2=23×43lg=8l9g.
The acceleration of the ball at t=0 is its tangential acceleration at=lα0 (since it starts from rest, centripetal acceleration is zero). at=l(8l9g)=89g. Given that the acceleration is 8αg, we have 8αg=89g, which implies α=9. Match: (P) → (4)
Part (Q): The speed of the ball when rod becomes vertical.
We use the principle of conservation of mechanical energy: ΔKE+ΔPEg+ΔPEe=0. Let the pivot be the reference level for gravitational potential energy (y=0). Let the initial horizontal position be the reference for electric potential energy (x=l).
Initial state (horizontal rod):
- KEi=0 (released from rest).
- PEg,i=mg(0)+mg(0)=0 (CM of rod at y=0, ball at y=0).
- PEe,i=−qE⋅ri=−q(Ei^)⋅(li^)=−qEl.
Final state (vertical rod, downwards):
- The rod has rotated 90∘ downwards.
- CM of rod is at (0,−l/2). Ball is at (0,−l).
- KEf=21Iω2=21(34ml2)ω2=32ml2ω2.
- PEg,f=mg(−l/2)+mg(−l)=−23mgl.
- PEe,f=−qE⋅rf=−q(Ei^)⋅(0i^−lj^)=0.
Applying conservation of energy: KEf−KEi+PEg,f−PEg,i+PEe,f−PEe,i=0. 32ml2ω2−0+(−23mgl)−0+0−(−qEl)=0. 32ml2ω2−23mgl+qEl=0. Substitute E=2qmg: 32ml2ω2−23mgl+q(2qmg)l=0. 32ml2ω2−23mgl+2mgl=0. 32ml2ω2−mgl=0. 32ml2ω2=mgl. ω2=23lg. ω=2l3g.
The speed of the ball is v=lω. v=l2l3g=2l3gl2=23gl. Given that the speed is 2βgl, we have 2βgl=23gl, which implies β=3. Match: (Q) → (1)
Part (R): The angle made by rod with vertical at rotational equilibrium.
Let θ be the angle the rod makes with the downward vertical.
- Position of CM of rod: (l/2sinθ,−l/2cosθ).
- Position of ball: (lsinθ,−lcosθ).
Torques for general angle θ:
- Gravitational torque on rod: τg,rod=mg(l/2sinθ) (clockwise).
- Gravitational torque on ball: τg,ball=mg(lsinθ) (clockwise).
- Electric torque on ball: The electric force Fe=mg/2 is horizontal to the right.
- The lever arm for this force is the vertical component of the ball's position, lcosθ.
- This torque acts counter-clockwise (pulling the rod towards the horizontal).
- τe=Fe(lcosθ)=2mg(lcosθ)=2mglcosθ (counter-clockwise).
At rotational equilibrium, the net torque is zero: τnet=0. τg,rod+τg,ball−τe=0. 2mglsinθ+mglsinθ−2mglcosθ=0. (21+1)mglsinθ−2mglcosθ=0. 23mglsinθ−2mglcosθ=0. Divide by 2mgl: 3sinθ−cosθ=0. 3sinθ=cosθ. tanθ=31.
The angle made by the rod with the downward vertical is θ=tan−1(1/3). Given that the angle is tan−1(1/x), we have x=3. Match: (R) → (1)
Part (S): Angular acceleration of rod when system is at rotational equilibrium and electric field suddenly switched off.
At rotational equilibrium, we found tanθ=1/3. From this, we can construct a right triangle: opposite side = 1, adjacent side = 3. Hypotenuse = 12+32=10. So, sinθ=101.
When the electric field is suddenly switched off, the electric force becomes zero, so τe=0. The net torque acting on the system at this instant is only due to gravity: τnet=τg,rod+τg,ball=23mglsinθ.
Using Newton's second law for rotation: τnet=Iα. 23mglsinθ=(34ml2)α. α=4ml2/33mgl/2sinθ=8l9gsinθ. Substitute sinθ=101: α=8l9g(101)=810l9g.
Given that the angular acceleration is y10l9g, we have y10l9g=810l9g, which implies y=8. Match: (S) → (3)
Final Matches: (P) → (4) (Q) → (1) (R) → (1) (S) → (3)
The question asks for the values of α,β,x,y. α=9 β=3 x=3 y=8
The provided question format is a matching type, but it asks for the values of α,β,x,y. The options in List-II are the possible values.
The question asks to match List-I items with List-II options. (P) α=9 matches with (4) (Q) β=3 matches with (1) (R) x=3 matches with (1) (S) y=8 matches with (3)
The question is a multiple-choice question where we need to find the correct options for P, Q, R, S. Since it's a list matching, we provide the calculated values.