Question
Question: A circular race track has a radius of 500m and is banked to \(10^\circ \) . If the coefficient of fr...
A circular race track has a radius of 500m and is banked to 10∘ . If the coefficient of friction between the tyres of a vehicle and the road surface is 0⋅25 , compute (a) maximum speed to avoid slipping, (b) the optimum speed to avoid wear and tear of the tyres. (Take g=9⋅8ms−2 ).
Solution
The forces acting on the vehicle moving along the circular track are its weight, the frictional force, the normal reaction force and the centrifugal force. Sketching a free body diagram of the vehicle moving along the banked circular track will help us to take into account the components of these forces to derive an expression for the maximum velocity of the vehicle so that it does not slip.
Formula used:
-The maximum velocity to avoid slipping is given by, vmax=1−μtanθrg(tanθ+μ) where r is the radius of the circular path, g is the acceleration due to gravity, θ is the angle at which the path is banked and μ is the coefficient of friction.
-The optimum velocity to avoid wear and tear is given by, voptimum=rgtanθ where r is the radius of the circular path, g is the acceleration due to gravity and θ is the angle at which the path is banked.
Complete step by step solution:
Step 1: Sketch a free body diagram to resolve the components of the various forces in action.
Let m be the mass and v be the velocity of the vehicle moving along the circular track. 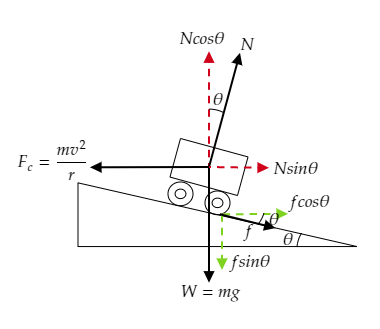
In the above figure, the frictional force f is resolved into its components fcosθ and fsinθ. The normal reaction force N is also resolved into its components Ncosθ and Nsinθ. The weight of the vehicle W=mg is acting downwards and the centrifugal force Fc=rmv2 is acting away from the centre of the track.
The track is given to be banked to an angle θ=10∘ .
The radius of the race track is given to be r=500m .
The coefficient of friction between the tyres of the vehicle and the road is given to be μ=0⋅25.
Let m be the mass and v be the velocity of the vehicle moving along the circular track.
Step 2: Apply the force balance equation to derive an expression for maximum velocity without slipping.
For the force balance equation along the vertical direction, the total forces acting in the upward direction must be equal to the total forces acting in the downward direction.
i.e., Fupward=Fdownward
⇒Ncosθ=mg+fsinθ
⇒mg=Ncosθ−ifsinθ --------- (1)
Similarly, for the force balance equation along the horizontal direction, we have rmv2=Nsinθ+fcosθ --------- (2)
Now dividing equation (2) by (1) we get, mg(rmv2)=Ncosθ−ifsinθNsinθ+fcosθ ------- (3)
The frictional force is expressed as f=μN .
Then equation (3) becomes rgv2=Ncosθ−μNsinθNsinθ+μNcosθ
Or, on simplifying this becomes rgv2=cosθ−μsinθsinθ+μcosθ
Dividing the numerator and denominator of the above expression by cosθ we get, rgv2=1−μtanθtanθ+μ
⇒v=1−μtanθrg(tanθ+μ) --------- (4)
Equation (4) is the required expression for the maximum velocity of the vehicle.
Step 3: Substitute appropriate values in equation (4) to obtain the maximum velocity without slipping.
The maximum velocity of the car to avoid slipping is given by equation (4) as vmax=1−μtanθrg(tanθ+μ)
Substituting for θ=10∘ , r=500m , μ=0⋅25 and g=9⋅8ms−2 in the above expression we get, vmax=1−(0⋅25×tan10∘)500×9⋅8×(tan10∘+0⋅25)=46⋅75ms−1
∴ the maximum velocity to avoid slipping is obtained to be vmax=46⋅75ms−1 .
Step 4: Substitute μ=0 in equation (4) to obtain the expression of optimum velocity.
When μ=0 , the optimum velocity of the vehicle becomes voptimum=rgtanθ ------ (5)
Substituting for θ=10∘ , r=500m and g=9⋅8ms−2 in equation (5) we get, voptimum=500×9⋅8×tan10∘=29⋅39ms−1
∴ the optimum speed to avoid wear and tear is obtained to be voptimum=29⋅39ms−1 .
Note: For the vehicle to avoid slipping, it should get some kind of grip on the road. This grip is provided by the friction present between the tyres of the vehicle and the road. So while obtaining the maximum velocity to avoid slipping we take into account the frictional force. However, the tyres of the vehicle will wear and tear due to the friction present between the tyres and the road. So we discard friction and take μ=0 while expressing the optimum velocity of the vehicle to avoid wear and tear.