Question
Question: A thin rod with length L, mass m and uniform density lies on the y-axis with its midpoint at the ori...
A thin rod with length L, mass m and uniform density lies on the y-axis with its midpoint at the origin. A point object A with mass m travels with velocity u in the positive x direction hits the rod with impact parameter h, where −2L<h<2L, as shown in fig. 2a. The collision is perfectly inelastic. Suppose another point object B of mass m is located very close to point C, at the left hand side, as shown in figure 2b. For option (C) and (D) assume that the particle A collides with the lower end of the rod (h=−2L). The collision between the rod and particle B is elastic in nature.
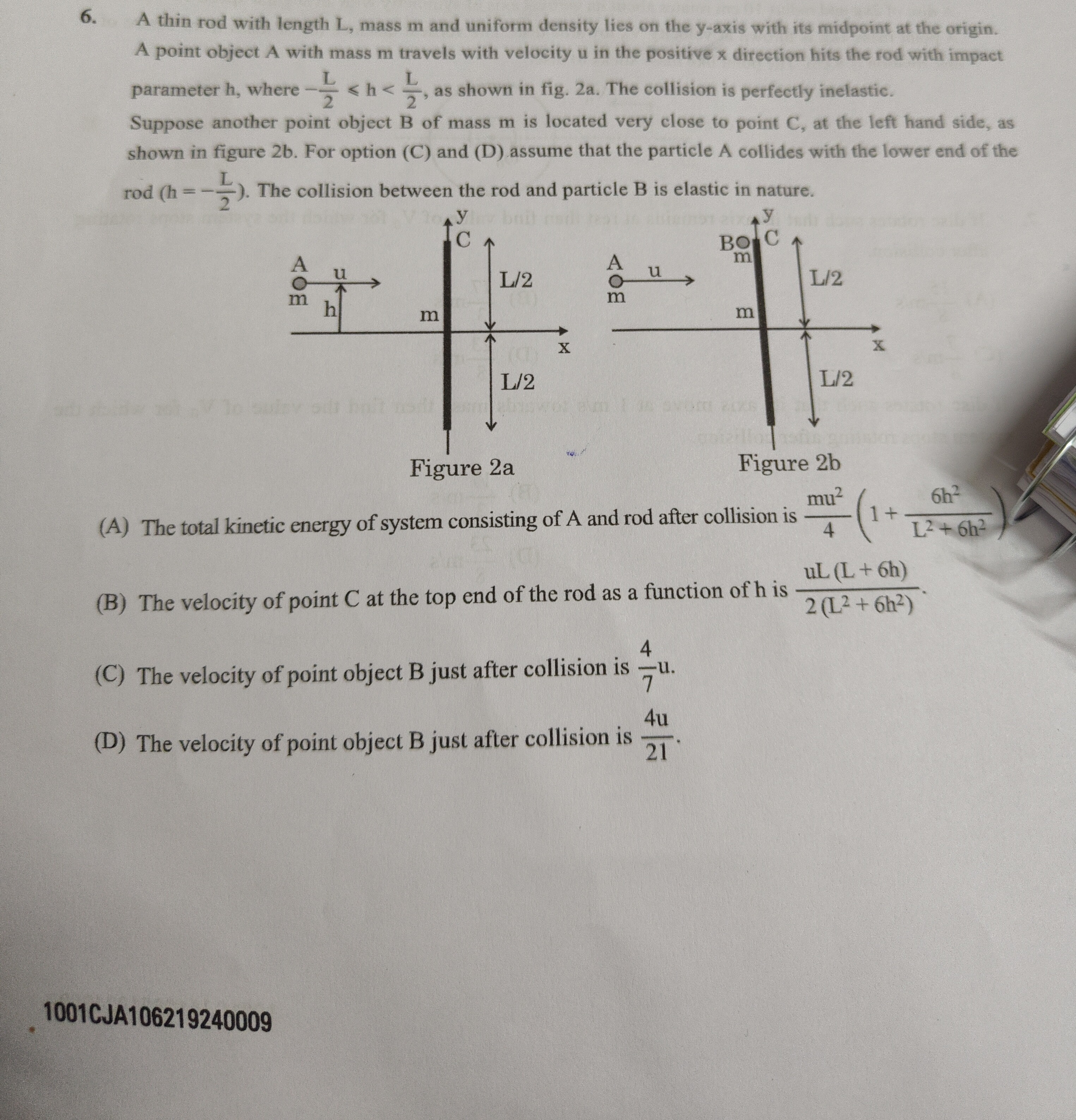
The total kinetic energy of system consisting of A and rod after collision is 4mu2(1+L2+6h26h2)
The velocity of point C at the top end of the rod as a function of h is 2(L2+6h2)uL(L+6h)
The velocity of point object B just after collision is 74u.
The velocity of point object B just after collision is 214u.
A, B, D
Solution
The problem involves two distinct collision scenarios.
Scenario 1: Particle A collides with the rod (Figure 2a)
- Mass of particle A: mA=m
- Mass of rod: mR=m
- Initial velocity of particle A: uA=ui^
- Initial velocity of rod: uR=0
- Impact parameter: h (particle A hits at y=h)
- Collision type: Perfectly inelastic. Particle A sticks to the rod.
1. Conservation of Linear Momentum:
The total mass of the system after collision is Mtotal=mA+mR=m+m=2m.
Let the velocity of the center of mass (CM) of the combined system be VCM.
Initial momentum: Pi=mu
Final momentum: Pf=MtotalVCM=2mVCM
mu=2mVCM⟹VCM=2u.
The combined system translates with velocity 2ui^.
2. Conservation of Angular Momentum:
We conserve angular momentum about the origin (center of the rod).
Initial angular momentum: Li=rA×pA=(hj^)×(mui^)=−muh(j^×i^)=muhk^. (Note: j^×i^=−k^, so Li=muhk^ if h is positive. If h is negative, Li would be in the −k^ direction. Let's write Li=muh and determine direction later, or use the scalar magnitude and assign direction to ω.)
Let's define angular momentum as positive for counter-clockwise rotation (along +z).
For particle A at (0,h) with velocity ui^, the angular momentum about the origin is mu(−h) or muh depending on the coordinate system.
Using L=r×p: r=hj^, p=mui^. So L=(hj^)×(mui^)=−muhk^.
So, the initial angular momentum is Li=−muh.
The moment of inertia of the combined system (rod + A) about the origin is IO=Irod,O+IA,O.
Irod,O=121mL2.
IA,O=mh2.
So, IO=121mL2+mh2=m(12L2+h2).
Final angular momentum: Lf=IOω.
−muh=m(12L2+h2)ω
ω=m(12L2+h2)−muh=12L2+12h2−uh=L2+12h2−12uh.
The negative sign indicates clockwise rotation.
The new center of mass (CM') of the combined system (rod + A) is at YCM′=mR+mAmR⋅0+mA⋅h=2mmh=2h.
The motion of the combined system is a translation of its CM' with velocity VCM=u/2 and a rotation about CM' with angular velocity ωCM′.
The angular velocity ωCM′ is the same as ω calculated about the origin because the origin and CM' are moving with the same translational velocity VCM in the x-direction, and the rotation is about the z-axis. So ωCM′=ω=L2+12h2−12uh.
Moment of inertia of the combined system about its CM':
ICM′=Irod,CM′+IA,CM′
Irod,CM′=Irod,O+mR(h/2)2=121mL2+m(h/2)2=m(12L2+4h2).
IA,CM′=mA(h−h/2)2=m(h/2)2=m4h2.
ICM′=m(12L2+4h2+4h2)=m(12L2+2h2)=m12L2+6h2.
Let's re-calculate ω using conservation of angular momentum about CM' directly.
Initial angular momentum about CM': Li,CM′=rA,CM′×pA=((h−h/2)j^)×(mui^)=(h/2)j^×(mui^)=−mu(h/2)k^.
Li,CM′=−muh/2.
Final angular momentum about CM': Lf,CM′=ICM′ωCM′.
−muh/2=m12L2+6h2ωCM′
ωCM′=m(L2+6h2)/12−muh/2=L2+6h2−6uh. This is the correct angular velocity.
Part (A): Total kinetic energy of the system consisting of A and rod after collision
KEtotal=KEtranslational+KErotational
KEtranslational=21MtotalVCM2=21(2m)(2u)2=m4u2.
KErotational=21ICM′ωCM′2=21(m12L2+6h2)(L2+6h2−6uh)2
KErotational=21m12L2+6h2(L2+6h2)236u2h2=24(L2+6h2)36mu2h2=2(L2+6h2)3mu2h2.
KEtotal=4mu2+2(L2+6h2)3mu2h2=4mu2(1+L2+6h26h2).
Statement (A) is Correct.
Part (B): Velocity of point C at the top end of the rod as a function of h
Point C is at y=L/2 relative to the origin.
The CM' of the combined system is at y=h/2.
The position vector of point C relative to CM' is rC/CM′=(L/2−h/2)j^=2L−hj^.
The velocity of point C is vC=VCM+ωCM′×rC/CM′.
VCM=2ui^.
ωCM′=L2+6h2−6uhk^.
vC=2ui^+(L2+6h2−6uhk^)×(2L−hj^)
vC=2ui^−2(L2+6h2)6uh(L−h)(k^×j^)
Since k^×j^=−i^:
vC=2ui^−L2+6h23uh(L−h)(−i^)
vC=(2u+L2+6h23uh(L−h))i^
vC=u(21+L2+6h23hL−3h2)i^
vC=u(2(L2+6h2)L2+6h2+6hL−6h2)i^
vC=u(2(L2+6h2)L2+6hL)i^=2(L2+6h2)uL(L+6h)i^.
Statement (B) is Correct.
Scenario 2: Rod (with A attached) collides with particle B (Figure 2b)
- Assumptions: Particle A collides with the lower end of the rod, so h=−L/2.
- Collision between rod+A system (let's call it 'R') and particle B is elastic.
- Mass of particle B: mB=m.
- Particle B is located very close to point C (top end of the rod).
First, find the velocity of the rod+A system just before it hits B.
Substitute h=−L/2 into the expressions for VCM and ωCM′.
VCM=2ui^.
ωCM′=L2+6(−L/2)2−6u(−L/2)=L2+6(L2/4)3uL=L2+3L2/23uL=5L2/23uL=5L6u.
So, ωCM′=5L6uk^. (Counter-clockwise rotation).
Particle B is located very close to point C, which is at y=L/2 from the origin.
The CM' of the rod+A system is at y=h/2=(−L/2)/2=−L/4.
The point of impact on the rod (let's call it P) is at y=L/2 from the origin.
The position vector of P relative to CM' is rP/CM′=(L/2−(−L/4))j^=(L/2+L/4)j^=43Lj^.
The velocity of point P on the rod just before collision with B is vP=VCM+ωCM′×rP/CM′.
vP=2ui^+(5L6uk^)×(43Lj^)
vP=2ui^+20L18uL(k^×j^)
vP=2ui^+109u(−i^)
vP=(2u−109u)i^=(105u−9u)i^=−104ui^=−52ui^.
So, the velocity of the point of impact on the rod just before collision is vP=−52u.
Now, we have an elastic collision between particle B (mass mB=m, initial velocity uB=0) and the point P on the rod (effective mass Meff, initial velocity vP=−2u/5).
For an elastic collision, the relative velocity of approach equals the negative of the relative velocity of separation.
vB′−vP′=−(uB−vP)=−(0−(−2u/5))=−2u/5.
vB′−vP′=−2u/5(1)
Also, for an elastic collision, kinetic energy is conserved. However, the rod is a rigid body, so we need to use the concept of impulse and conservation of momentum.
The collision is instantaneous. Consider the collision in the reference frame of the CM of the rod+A system.
Initial velocity of particle B relative to CM: uB′=0−VCM=−u/2.
Initial velocity of point P relative to CM: vP′=vP−VCM=−2u/5−u/2=(−4u−5u)/10=−9u/10.
This is getting complicated. Let's use the concept of effective mass for collision.
Consider the collision between particle B and the rod. The rod has translational motion and rotational motion.
Let VCM′ be the final translational velocity of the rod's CM and ωCM′′ be the final angular velocity.
Let vB′ be the final velocity of particle B.
Since the collision is elastic, we have two conservation laws:
-
Conservation of linear momentum (system: rod+A + B):
Initial momentum: Pi=MtotalVCM+mBuB=2m(u/2)+m(0)=mu.
Final momentum: Pf=MtotalVCM′+mBvB′=2mVCM′+mvB′.
mu=2mVCM′+mvB′⟹u=2VCM′+vB′(Eq.2) -
Conservation of angular momentum about CM' of the rod+A system:
Initial angular momentum: Li,CM′=ICM′ωCM′+rB/CM′×mBuB.
rB/CM′=43Lj^. uB=0. So Li,CM′=ICM′ωCM′.
Li,CM′=m12L2+6h2ωCM′=m12L2+6(−L/2)2⋅5L6u=m12L2+3L2/2⋅5L6u=m125L2/2⋅5L6u=m245L2⋅5L6u=4muL.
Final angular momentum: Lf,CM′=ICM′ωCM′′+rB/CM′×mBvB′.
Lf,CM′=ICM′ωCM′′+(43Lj^)×(mvB′i^).
Lf,CM′=ICM′ωCM′′−mvB′43Lk^.
4muL=m12L2+6(−L/2)2ωCM′′−mvB′43L
4muL=m245L2ωCM′′−mvB′43L
Divide by mL: 4u=245LωCM′′−43vB′(Eq.3) -
Coefficient of restitution for elastic collision (e=1):
The velocity of separation of the point of contact on the rod from B is equal to the negative of the velocity of approach.
Let vP′ be the final velocity of point P on the rod.
vP′=VCM′+ωCM′′×rP/CM′=VCM′+ωCM′′(43Lj^)×k^=VCM′−ωCM′′43L. (Assuming ωCM′′ is clockwise if negative)
So, vP′=VCM′−ωCM′′43L.
vB′−vP′=−(uB−vP)
vB′−(VCM′−ωCM′′43L)=−(0−(−2u/5))=−2u/5.
vB′−VCM′+ωCM′′43L=−2u/5(Eq.4)
We have a system of three linear equations (Eq. 2, Eq. 3, Eq. 4) for three unknowns (VCM′, ωCM′′, vB′).
From Eq. 2: VCM′=2u−vB′. Substitute into Eq. 4:
vB′−2u−vB′+ωCM′′43L=−2u/5
22vB′−u+vB′+ωCM′′43L=−2u/5
23vB′−u+ωCM′′43L=−2u/5(Eq.5)
From Eq. 3: 4u=245LωCM′′−43vB′
Multiply by 24: 6u=5LωCM′′−18vB′
5LωCM′′=6u+18vB′⟹ωCM′′=5L6u+18vB′.
Substitute ωCM′′ into Eq. 5:
23vB′−u+(5L6u+18vB′)43L=−2u/5
23vB′−u+203(6u+18vB′)=−2u/5
Multiply by 20:
10(3vB′−u)+3(6u+18vB′)=−8u
30vB′−10u+18u+54vB′=−8u
84vB′+8u=−8u
84vB′=−16u
vB′=−8416u=−214u.
The negative sign means particle B moves in the negative x-direction after collision.
Statement (C) is 74u.
Statement (D) is 214u.
Since we found vB′=−214u, the magnitude is 214u.
Statement (D) is Correct.
Final check of correct options: (A), (B), (D).