Question
Question: An object is made by removing a D - shaped chunk from a cylinder of radius R. m is the mass of the o...
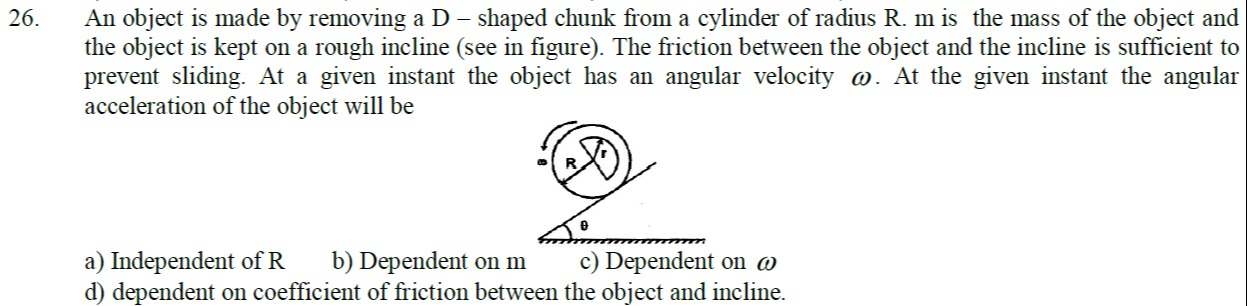
An object is made by removing a D - shaped chunk from a cylinder of radius R. m is the mass of the object and the object is kept on a rough incline (see in figure). The friction between the object and the incline is sufficient to prevent sliding. At a given instant the object has an angular velocity ω. At the given instant the angular acceleration of the object will be
Independent of R
Dependent on m
Dependent on ω
dependent on coefficient of friction between the object and incline.
b,c
Solution
The problem describes an object made by removing a D-shaped chunk from a cylinder of radius R, with mass m. This object is placed on a rough incline and rolls without sliding. We need to determine the dependencies of its angular acceleration α at a given instant when its angular velocity is ω.
Understanding the Object and Motion:
- Asymmetric Object: The key feature is that the object is not symmetric. Its center of mass (CM) does not coincide with the geometric center (O) of the cylinder from which it was formed. Let
hbe the distance between the geometric centerOand the center of massCM. For a D-shaped object (semicylinder) of radius R,h = 4R/(3π). This meanshis dependent onR. - Rolling without Sliding: This implies that the point of contact with the incline is instantaneously at rest.
- Variable CM Position: As the object rolls, the orientation of the line connecting
OtoCMchanges with respect to the incline. This means the position of the CM relative to the point of contact and relative to the incline changes dynamically.
Equations of Motion:
Let θ be the angle of inclination of the rough surface.
Let I_CM be the moment of inertia of the object about an axis passing through its center of mass and perpendicular to the plane of motion.
Let α be the angular acceleration of the object.
Let a_CM be the linear acceleration of the center of mass.
The forces acting on the object are:
- Gravitational force
mgacting vertically downwards through the CM. - Normal force
Nacting perpendicular to the incline at the point of contact. - Frictional force
facting parallel to the incline at the point of contact. Since the object is rolling down and friction prevents sliding,facts up the incline.
We can apply Newton's second law for translational motion and Euler's second law for rotational motion.
It is often convenient to take torques about the instantaneous center of rotation (ICOR), which is the point of contact P for pure rolling.
The general equation for torque about a point P is τ_P = I_P α, where I_P is the moment of inertia about P. This is valid if P is a fixed point or if the acceleration of P is zero. For pure rolling, a_P = 0, so this approach is applicable.
However, for an asymmetric body, I_P itself is not constant. I_P = I_CM + m d_P^2, where d_P is the distance from CM to P. As the object rolls, the distance d_P changes because the orientation of the CM relative to O (and thus P) changes.
A more robust approach for such problems is to use the equations of motion for the CM and the rotational equation about the CM.
-
Translational motion of CM:
- Along the incline (x-axis, positive downwards):
mg sin θ - f = m a_CM,x - Perpendicular to the incline (y-axis, positive outwards):
N - mg cos θ = m a_CM,ySince the CM is not atO,a_CM,ymight not be zero. It will depend on the instantaneous position of CM.
- Along the incline (x-axis, positive downwards):
-
Rotational motion about CM:
τ_CM = I_CM αThe torque about CM is due toNandf. Letφbe the angle of the lineOCMwith the upward normal to the incline. The coordinates of the point of contactPrelative toCMare(-h sin φ, -(R - h cos φ)). The normal forceNacts along the y-axis (perpendicular to incline). The frictionfacts along the negative x-axis (up the incline).τ_CM = (r_P_CM)_x F_y - (r_P_CM)_y F_xτ_CM = (-h sin φ) N - (-(R - h cos φ)) (-f)τ_CM = -h N sin φ - f (R - h cos φ)(assumingαis clockwise, andfis up the incline). So,I_CM α = -h N sin φ - f (R - h cos φ) -
No-slip condition: The acceleration of the point of contact
Pisa_P = a_CM + α x r_P_CM + ω x (ω x r_P_CM). For pure rolling,a_P = 0. This impliesa_CM = -α x r_P_CM - ω x (ω x r_P_CM). Thisa_CMhas components along x and y axes.a_CM,x = Rα - hα cos φ - hω^2 sin φ(This is obtained by resolvinga_CMcomponents froma_Oanda_CM_rel_O).
a_CM,y = -hα sin φ + hω^2 cos φ
Substituting a_CM,x into the first translational equation:
mg sin θ - f = m (Rα - hα cos φ - hω^2 sin φ)
Substituting a_CM,y into the second translational equation:
N - mg cos θ = m (-hα sin φ + hω^2 cos φ)
From this, N = mg cos θ + m (-hα sin φ + hω^2 cos φ).
Now substitute N and f into the rotational equation I_CM α = -h N sin φ - f (R - h cos φ).
This will yield a complex expression for α that depends on:
m(mass of the object)R(radius of the cylinder)h(distance of CM from O, which itself depends onRfor a given geometry, e.g.,4R/(3π))θ(angle of incline)g(acceleration due to gravity)ω(instantaneous angular velocity)φ(instantaneous angular position/orientation of the object)
Let's look at the options:
a) Independent of R: The angular acceleration α depends on R directly (from Rα term, and h which depends on R) and also on I_CM which depends on R. So, it is dependent on R. This option is incorrect.
b) Dependent on m: The mass m appears in all translational and rotational equations. So α will be dependent on m. This option is correct.
c) Dependent on ω: The term hω^2 appears in the acceleration components and thus in the normal force N. Since N affects the torque equation, α will be dependent on ω. This option is correct.
d) Dependent on coefficient of friction between the object and incline: The problem states "The friction between the object and the incline is sufficient to prevent sliding." This means it's pure rolling, and f is a static friction force. The actual value of f is determined by the dynamics of the motion, not by the coefficient of friction μ_s as long as f ≤ μ_s N. The coefficient of friction μ_s only defines the limit of pure rolling. As long as pure rolling occurs, the angular acceleration is independent of the coefficient of friction itself, as long as it's large enough. So, this option is incorrect.
Therefore, α depends on m and ω. Since this is a multiple-choice question and typically only one option is correct unless specified, let's re-evaluate. However, in JEE/NEET, multiple correct options are possible.
Let's consider the general case. For an object rolling on an incline, the angular acceleration α is generally given by:
α = (mg sinθ - f_rolling) / (I_CM/R + mR) (for a symmetric object with a_CM = Rα)
For an asymmetric object, the motion is more complex. The torque due to gravity about the CM itself changes as the object rotates, and the relationship between a_CM and α is not simply Rα.
The angular acceleration α will be a function of m, R, θ, g, ω, and the instantaneous orientation φ.
Since ω is part of the terms involving centripetal acceleration of CM, α will depend on ω.
Since m is present in all force and inertia terms, α will depend on m.
Since R is present in inertia terms and CM position, α will depend on R.
The coefficient of friction μ is not explicitly involved in the equations of motion for pure rolling, as long as f < μN. It only sets the condition for pure rolling.
Thus, options (b) and (c) are correct.